|
Hao Dong董豪 北京大学长聘副教授 国家科技创新2030首席 国家级青年人才计划上纬启元 首席科学家 研究院院长 hao.dong%pku.edu.cn Google Scholar / Github |
About Me
I am a tenured Associate Professor in School of CS and CFCS at Peking University. I am also the Chief Scientist at PrimeBot. My current research focuses on embodied AI, large models, reinforcement learning, computer vision and the corresponding open-source system. Our goal is to find the scaling law to create a cost-effective general-purpose robot system. Our work has been recognized as a Best Application Paper Finalist at IROS 2024, the ByteDance Best Mentor Award 2024, the Nomination of Outstanding Young Researcher Paper Award at China Embodied AI Conference (CEAI) 2025, the Youth Outstanding Paper Award Shortlist at World Artificial Intelligence Conference (WAIC) 2025, and the Intel China Outstanding Research Award 2025.Additionally, I am fortunate to serve as an Area Chair or Senior Program Committee member for CVPR, CoRL, NeurIPS and AAAI conferences, and as the Associate Editor of ICRA and Machine Intelligence Research. I received the MIR Outstanding Associate Editor Award. Also, I have been involved in open source AI system for a long time, I have led several open source projects, such as Polar Research Station, TensorLayer
 and OpenMLsys
and OpenMLsys  , and have been recognized with multiple honors, including
the Huawei Smart Base - Outstanding Contribution Award conferred by China's Ministry of Education in 2021,
the Best Open Source Software Award at ACM Multimedia 2017,
and two OpenI Outstanding Project Awards (awarded in 2021 and 2022 respectively).
, and have been recognized with multiple honors, including
the Huawei Smart Base - Outstanding Contribution Award conferred by China's Ministry of Education in 2021,
the Best Open Source Software Award at ACM Multimedia 2017,
and two OpenI Outstanding Project Awards (awarded in 2021 and 2022 respectively).
more
Before joining PKU, I obtained my Ph.D. degree from Imperial College London under the supervision of Yike Guo. Prior to my Ph.D., I received a MSc degree with distinction from Imperial, and a first-class BEng degree from the University of Central Lancashire.News
show more
Our Lab
Our lab welcomes research interns, masters, PhD candidates and postdocs. The current research interests include:For more information, please contact me at hao.dong (a) pku.edu.cn
Services
Courses
previous courses
| Books
|
|
| Deep Reinforcement Learning: Fundamentals, Research and Applications
Hao Dong, Zihan Ding, Shanghang Zhang Eds. Springer Nature 2020 ISBN 978-981-15-4094-3 --- A Selection of the High-impact Publications in CS by Chinese Researchers from Springer Nature Chinese version深度强化学习:基础、研究与应用 董豪、丁子涵、仉尚航 等著(简体中文译本 Simplified Chinese)电子工业出版社 2021 ISBN 978-7-121-41188-5 新一代AI霸主 - 深度強化學習 董豪、丁子涵、仉尚航 等著(繁體中文譯本 Traditional Chinese) 深智數位 2022 ISBN 978-986-0776-82-9 |
|
| Machine Learning System: Design and Implementation Luo Mai, Hao Dong Eds. Springer Nature coming soon Chinese version机器学习系统:设计与实现 麦络、董豪 等著清华大学出版社 Tsinghua University Press 2023 ISBN 978-7-302-63007-4 ]
[English Open Source Book (coming soon)]
[Chinese Open Source Book]
[京东]
|
|
| Papers
|
( show selected / show more / show all ) |
| Why Tree-Style Branching Matters for Thought Advantage Estimation in GRPO
Hongcheng Wang, Yinuo Huang, Sukai Wang, Guanghui Ren, Hao Dong International Conference on Machine Learning (ICML) 2026 [Paper] |
|
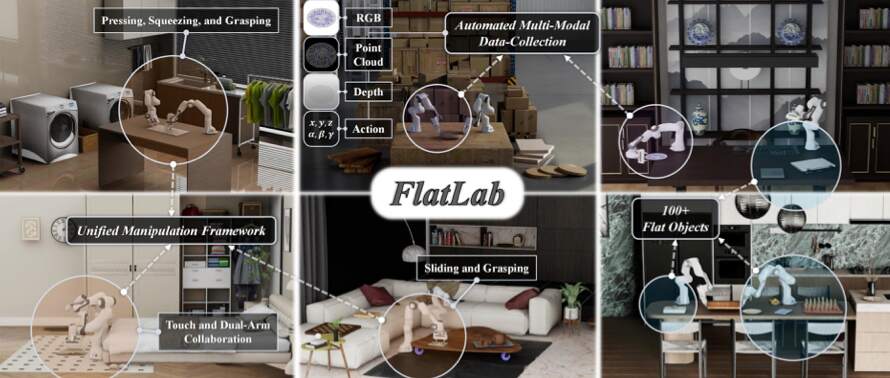
| FlatLab: A Unified Methodology Framework and Simulation-Based Benchmark for Robotic Manipulation of Flat Objects
Xingyu Zhu, Wenshuo Han, Zhouyu Wang, Yuran Wang, Ruihai Wu, Hao Dong, Fan Tang, Hechang Chen, Hyung Jin Chang, Yixing Gao International Conference on Machine Learning (ICML) 2026 |
|
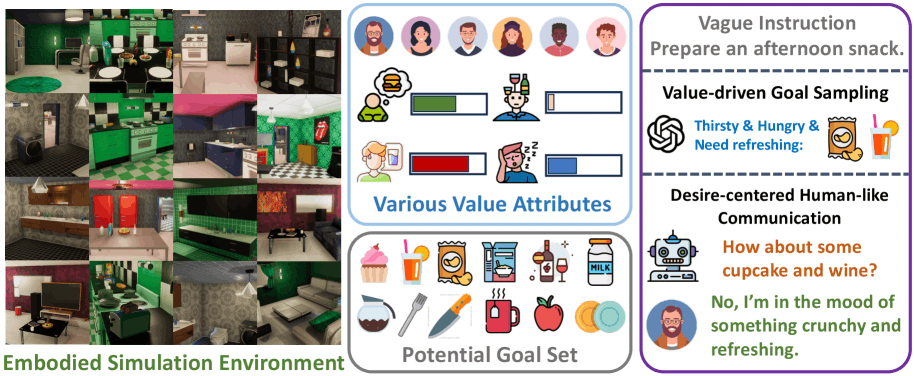
| FAMER: Communication-Efficient Desire Alignment for Proactive Embodied Human–Agent Interaction
Yuanfei Wang, Xinju Huang, Fangwei Zhong, Yaodong Yang, Yizhou Wang, Yuanpei Chen, Hao Dong Association for Computational Linguistics (ACL) 2026 [Paper] |
|
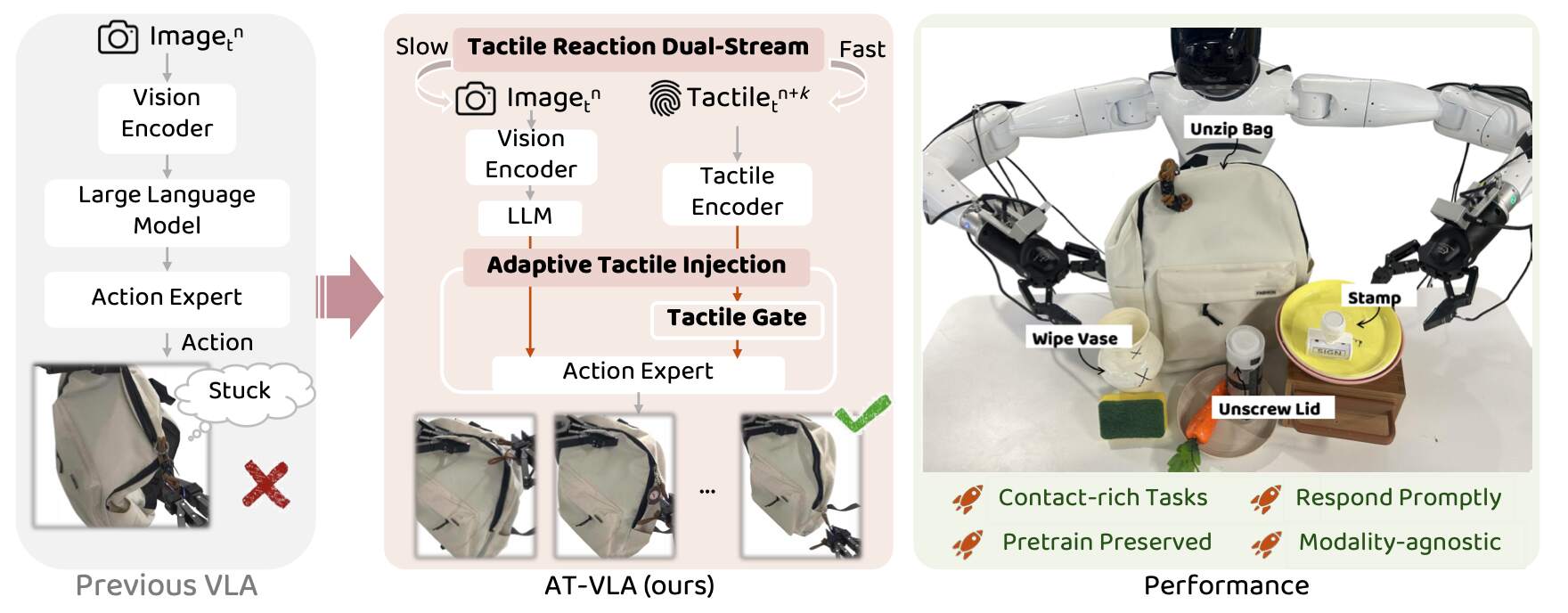
| AT-VLA: Adaptive Tactile Injection for Enhanced Feedback Reaction in Vision-Language-Action Models
Xiaoqi Li, Muhe Cai, Jiadong Xu, Juan Zhu, Hongwei Fan, Yan Shen, Guanghui Ren, Hao Dong Conference on Computer Vision and Pattern Recognition (CVPR) 2026 (Oral) |
|
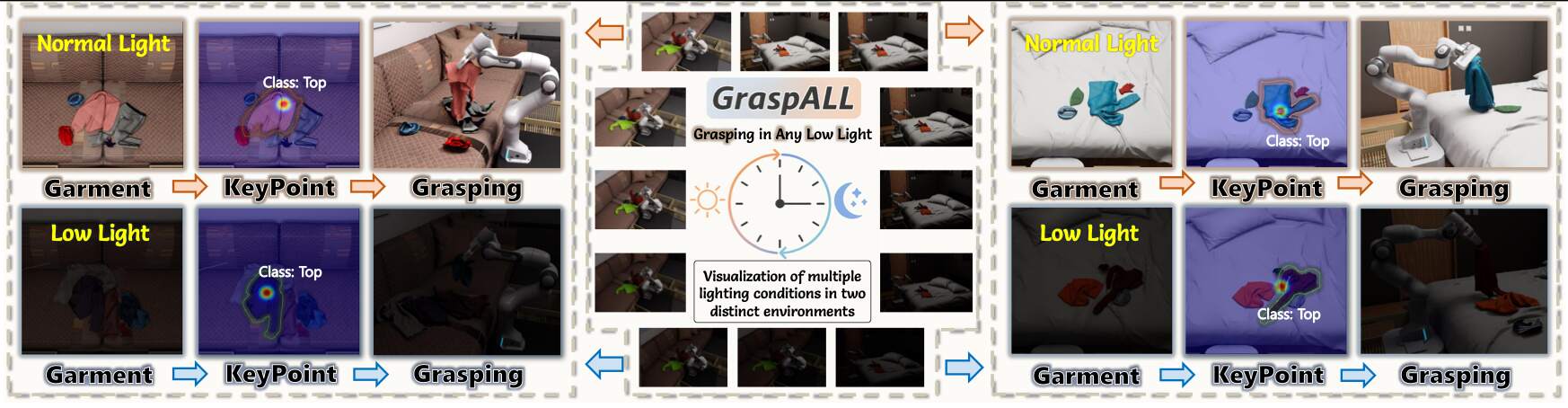
| GraspALL: Adaptive Structural Compensation from Luminance Variation for Robotic Garment Grasping in Any Low-Light Conditions
Haifeng Zhong, Wenshuo Han, Zhouyu Wang, Runyang Feng, Fan Tang, Tong-Yee Lee, Zipei Fan, Ruihai Wu, Yuran Wang, Hao Dong, Hechang Chen, Hyung Jin Chang, Yixing Gao Conference on Computer Vision and Pattern Recognition (CVPR) 2026 (Highlight) [Paper] [Code] |
|
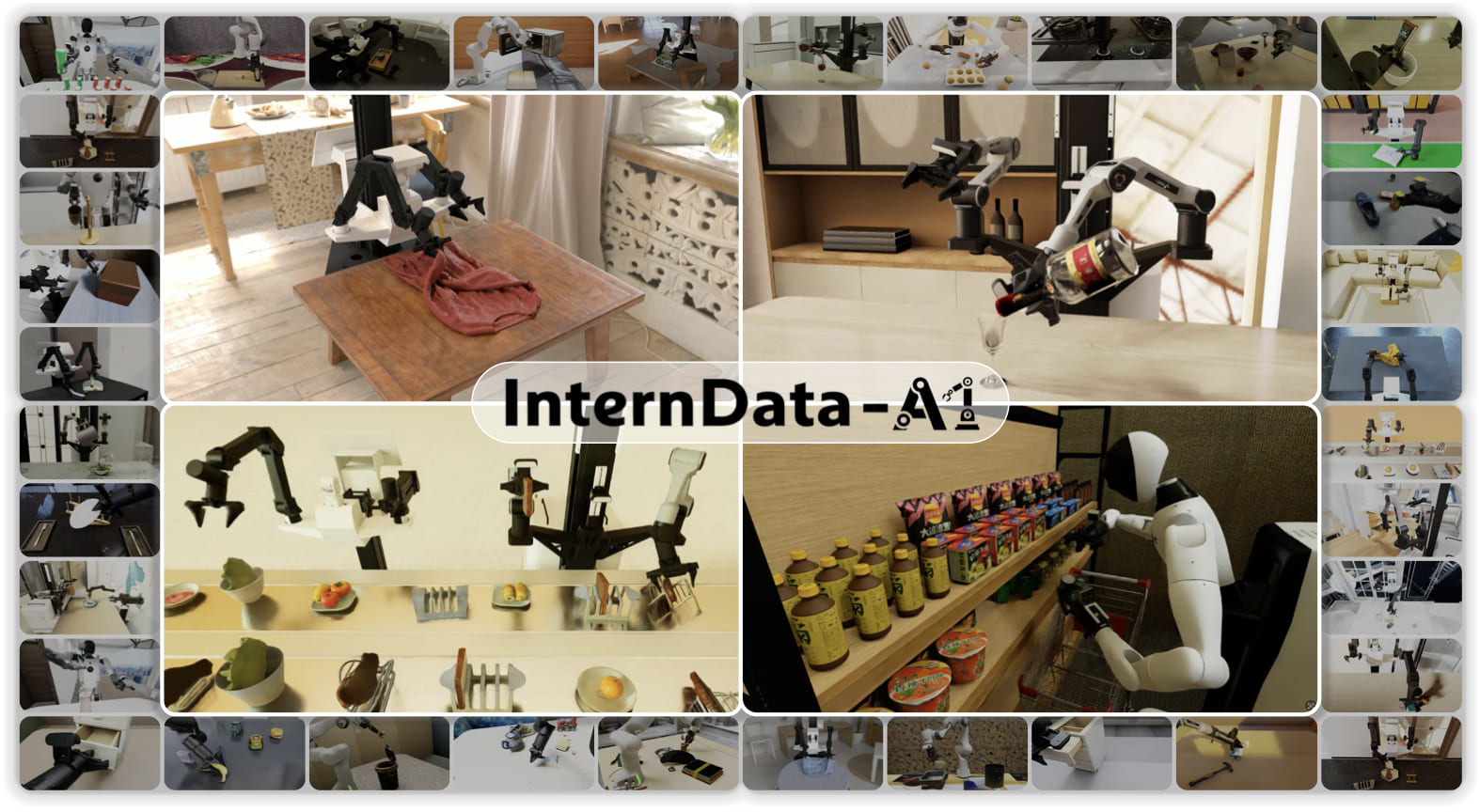
| InternData-A1: Pioneering High-Fidelity Synthetic Data for Pre-training Generalist Policy
Yang Tian, Yuyin Yang, Yiman Xie, Zetao Cai, Xu Shi, Ning Gao, Hangxu Liu, Xuekun Jiang, Zherui Qiu, Feng Yuan, Yaping Li, Ping Wang, Junhao Cai, Jia Zeng†, Hao Dong†, Jiangmiao Pang† Conference on Computer Vision and Pattern Recognition (CVPR) 2026 [Paper] [Huggingface] [Webpage] |
|
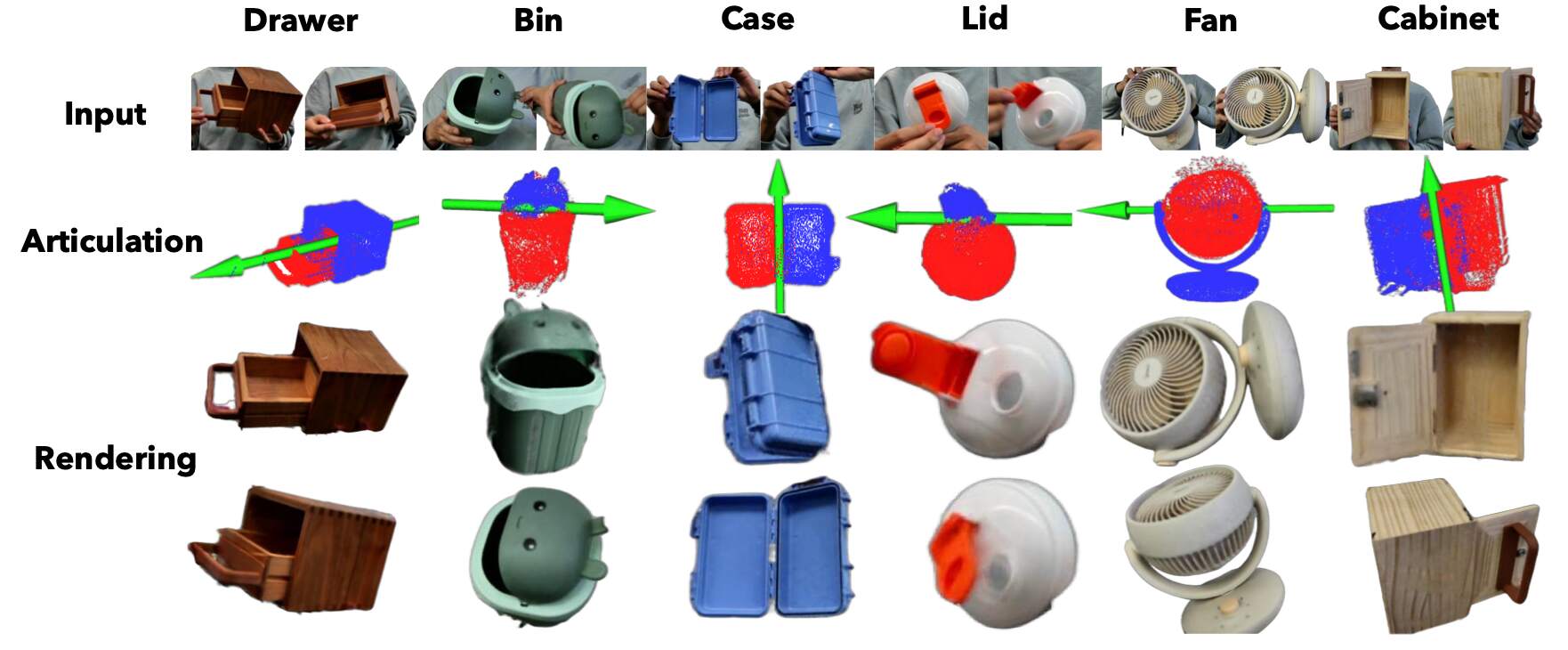
| FreeArtGS: Articulated Gaussian Splatting Under Free-moving Scenario
Hang Dai, Hongwei Fan, Han Zhang, Duojin Wu, Jiyao Zhang, Hao Dong Conference on Computer Vision and Pattern Recognition (CVPR) 2026 [Paper] [Webpage] [Code] |
|
| BiPreManip: Learning Affordance-Based Bimanual Pre-Manipulation through Anticipatory Collaboration
Yan Shen, Feng Jiang, Zichen He, Xiaoqi Li, Yuchen Liu, Zhiyu Li, Ruihai Wu, Hao Dong Conference on Computer Vision and Pattern Recognition (CVPR) 2026 (Highlight) [Paper] [Webpage] |
|
| RealAppiance: Let High-fidelity Appliance Assets Controllable and Workable as Aligned Real Manauls
Yuzheng Gao, Yuxing Long, Lei Kang, Yuchong Guo, Ziyan Yu, Shangqing Mao, Jiyao Zhang, Ruihai Wu, Dongjiang Li, Hui Shen, Hao Dong Conference on Computer Vision and Pattern Recognition (CVPR) 2026 (Highlight) [Paper] [Paper] [Webpage] |
|
| Real2Edit2Real: Generating Robotic Demonstrations via a 3D Control Interface
Yujie Zhao, Hongwei Fan, Di Chen, Shengcong Chen, Liliang Chen, Xiaoqi Li, Guanghui Ren, Hao Dong Conference on Computer Vision and Pattern Recognition (CVPR) 2026 [Paper] [Webpage] [Code] |
|
| RoboCOIN: An Open-Sourced Bimanual Robotic Data COllection for INtegrated Manipulation
Shihan Wu*, Xuecheng Liu*, Shaoxuan Xie*, Pengwei Wang*, Xinghang Li*, Bowen Yang, Zhe Li, Kai Zhu, Hongyu Wu, Yiheng Liu, Zhaoye Long, Yue Wang, Chong Liu, Dihan Wang, Ziqiang Ni, Xiang Yang, You Liu, Ruoxuan Feng, Runtian Xu, Lei Zhang, Denghang Huang, Chenghao Jin, Anlan Yin, Xinlong Wang, Zhenguo Sun, Mengfei Du, Mingyu Cao, Xiansheng Chen, Hongyang Cheng, Xiaojie Zhang, Junkai Zhao, Cheng Chi, Sixiang Chen, Huaihai Lyu, Xiaoshuai Hao, Yankai Fu, Yequan Wang, Bo Lei, Dong Liu, Xi Yang, Yance Jiao, Tengfei Pan, Yunyan Zhang, Songjing Wang, Ziqian Zhang, Xu Liu, Ji Zhang, Caowei Meng, Zhizheng Zhang, Jiyang Gao, Song Wang, Xiaokun Leng, Zhiqiang Xie, Zhenzhen Zhou, Peng Huang, Wu Yang, Yandong Guo, Yichao Zhu, Suibing Zheng, Hao Cheng, Xinmin Ding, Yang Yue, Huanqian Wang, Chi Chen, Jingrui Pang, YuXi Qian, Haoran Geng, Lianli Gao, Haiyuan Li, Bin Fang, Gao Huang, Hao Dong, He Wang, Hang Zhao, Yadong Mu, Di Hu, Hao Zhao, Shanghang Zhang†, Yonghua Lin†, Zhongyuan Wang†, Guocai Yao† arXiv 2025 [Paper] [Webpage] [创新基座介绍] |
|
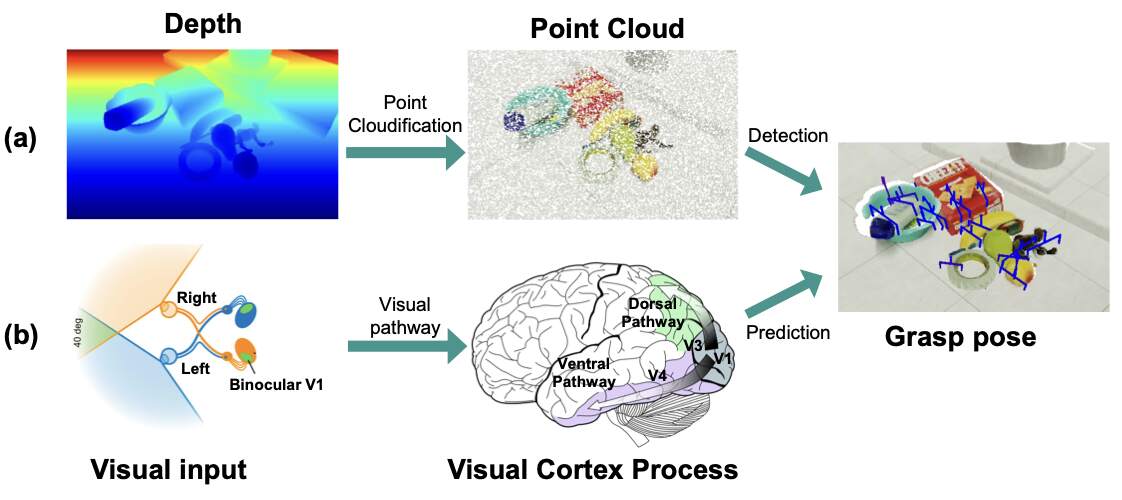
| SpikeGrasp: A Benchmark for 6-DoF Grasp Pose Detection from Stereo Spike Streams
Zhuoheng Gao, Jiyao Zhang, Zhiyong Xie, Hao Dong, Zhaofei Yu, Rongmei Chen, Guozhang Chen, Tiejun Huang arXiv 2025 [Paper] |
|
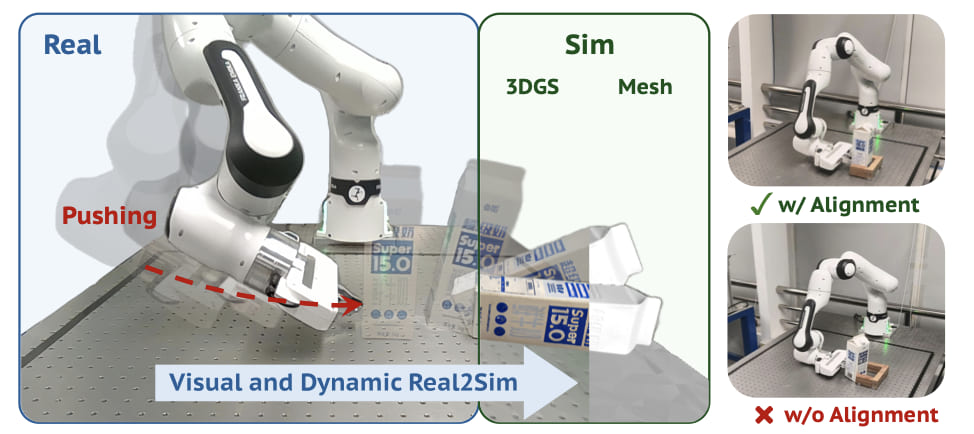
| TwinAligner: Visual-Dynamic Alignment Empowers Physics-aware Real2Sim2Real for Robotic Manipulation
Hongwei Fan, Hang Dai, Jiyao Zhang, Jinzhou Li, Qiyang Yan, Yujie Zhao, Mingju Gao, Jinghang Wu, Hao Tang, Hao Dong arXiv 2025 [Paper] [Webpage] [Code] |
|
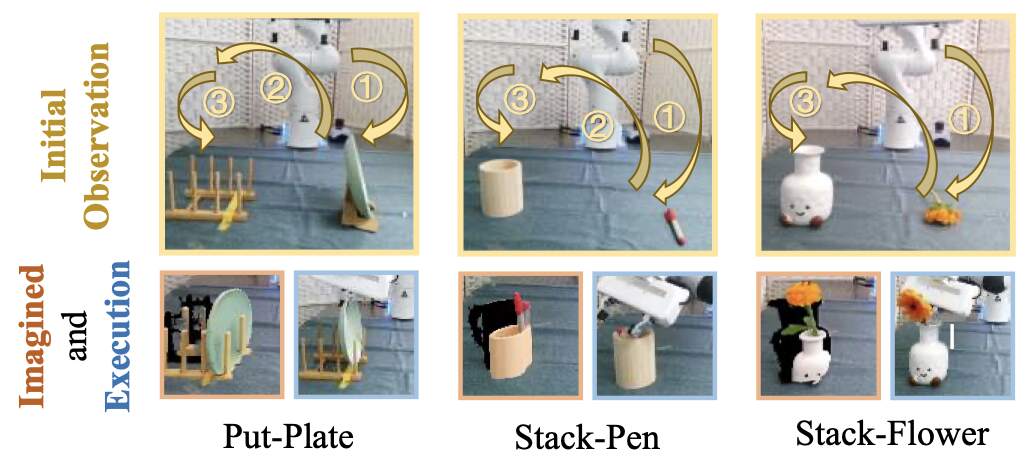
| Imagine2Act: Leveraging Object-Action Motion Consistency from Imagined Goals for Robotic Manipulation
Liang Heng, Jiadong Xu, Yiwen Wang, Xiaoqi Li, Muhe Cai, Yan Shen, Juan Zhu, Guanghui Ren, Hao Dong International Conference on Robotics and Automation (ICRA) 2026 [Paper] [Webpage] [Code] |
|
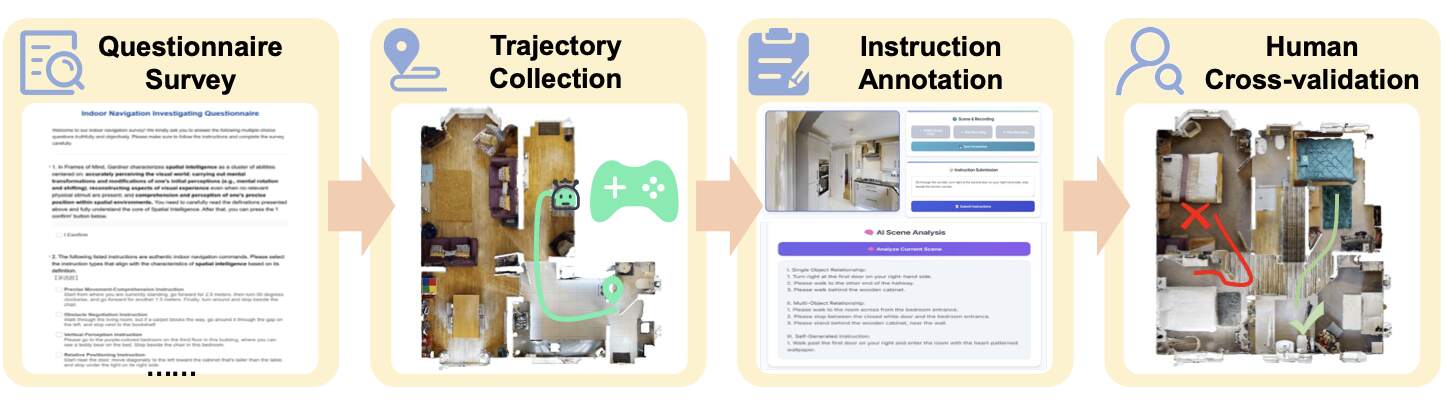
| NavSpace: How Navigation Agents Follow Spatial Intelligence Instructions
--- The first benchmark and model for navigation spatial intelligence Haolin Yang, Yuxing Long, Zhuoyuan Yu, Zihan Yang, Minghan Wang, Jiapeng Xu, Yihan Wang, Ziyan Yu, Wenzhe Cai, Lei Kang, Hao Dong International Conference on Robotics and Automation (ICRA) 2026 [Paper] [Webpage] [Code] |
|
| Sparse Meets Dense: Correspondence Guided Robotic Manipulation with Rigid-Deformable Interactions
Ziyu Zhu, Ruihai Wu, Yue Chen, Xirui Liang, Hojin Bae, Yuran Wang, Hao Dong International Conference on Robotics and Automation (ICRA) 2026 [Webpage] |
|
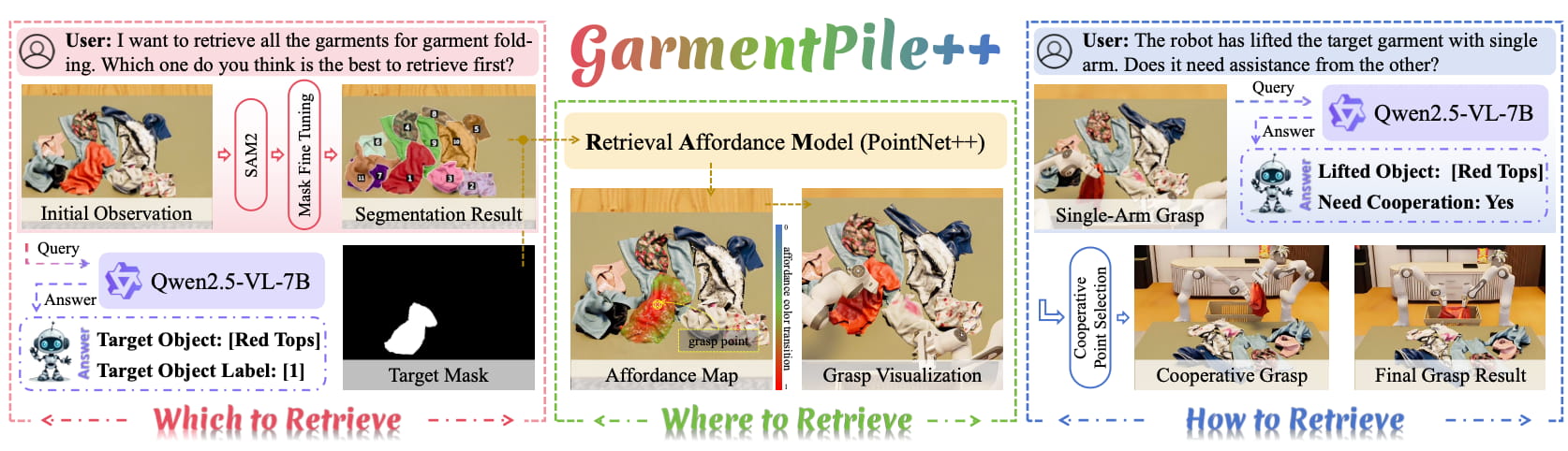
| GarmentPile++: Affordance-Driven Cluttered Garments Retrieval with Vision-Language Reasoning
Mingleyang Li, Yuran Wang, Yue Chen, Tianxing Chen, Jiaqi Liang, Zishun Shen, Haoran Lu, Ruihai Wu*, Hao Dong* International Conference on Robotics and Automation (ICRA) 2026 [Paper] [Webpage] [Code] |
|
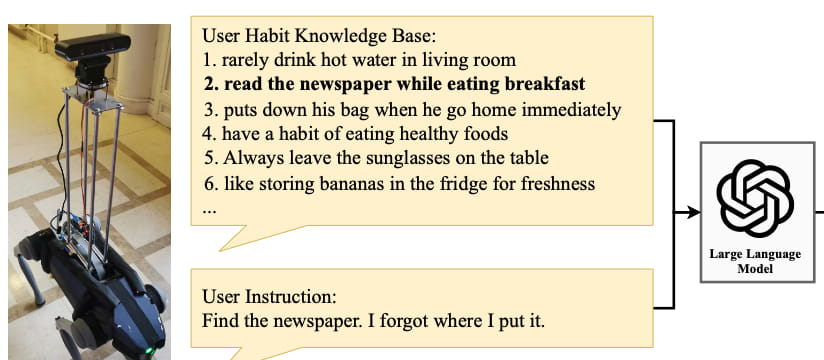
| User-Centric Object Navigation: A Benchmark with Integrated User Habits for Personalized Embodied Object Search
Hongcheng Wang, Jinyu Zhu, Hao Dong International Conference on Robotics and Automation (ICRA) 2026 [Paper] [Code] |
|
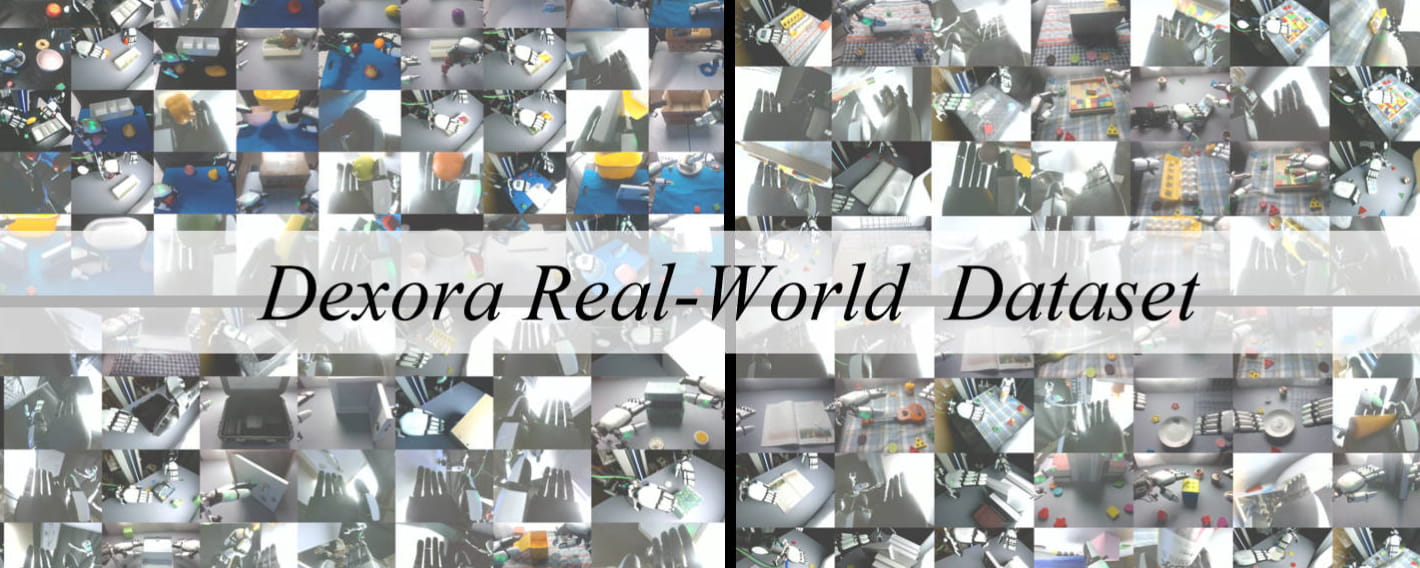
| Dexora: Open-source VLA for High-DoF Bimanual Dexterity
Zongzheng Zhang, Jingrui Pang, Zhuo Yang, Kun Li, Minwen Liao, Saining Zhang, Guoxuan Chi, Jinbang Guo, Huan-ang Gao, Modi Shi, Dongyun Ge, Yao Mu, Jiayuan Gu, Rui Chen, Hao Dong, Huazhe Xu, Li Yi, Yixin Zhu, Hang Zhao, Pengwei Wang, Shanghang Zhang, Guocai Yao, Jianyu Chen, Hongyang Li, Hao Zhao International Conference on Robotics and Automation (ICRA) 2026 [Webpage] [Code] |
|
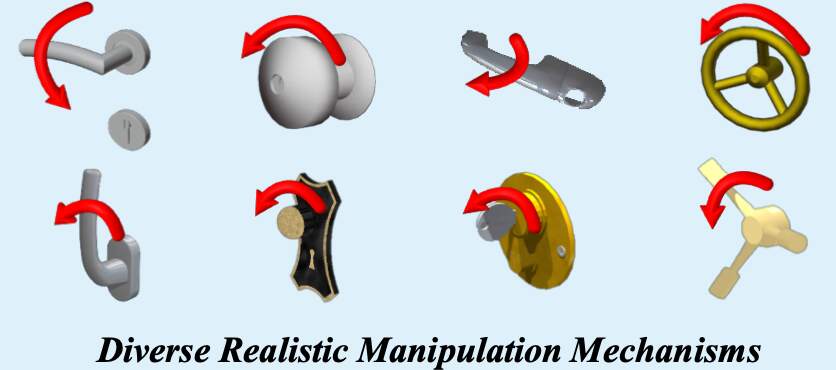
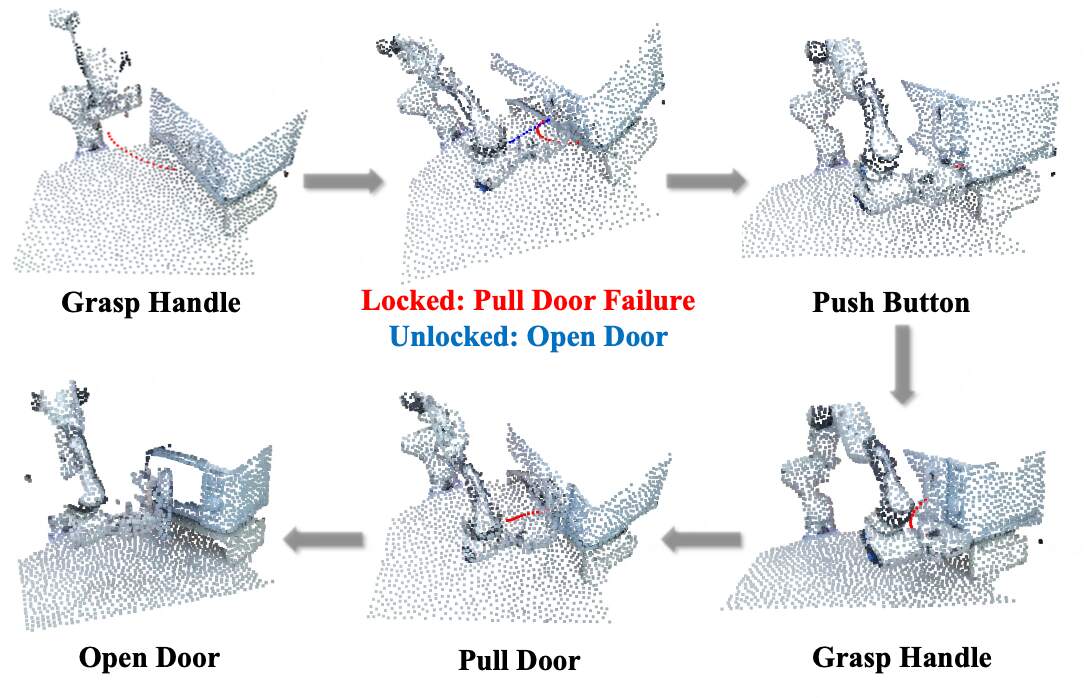
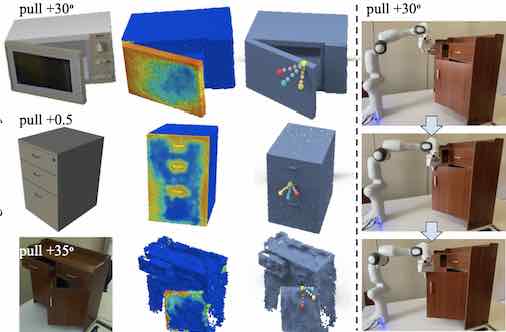
| UniDoorManip: Learning Universal Door Manipulation Policy over Large-scale and Diverse Door Manipulation Environments
Yu Li*, Xiaojie Zhang*, Ruihai Wu*, Zilong Zhang, Yiran Geng, Hao Dong, Zhaofeng He International Conference on Robotics and Automation (ICRA) 2026 [Paper] [Webpage] [量子位] |
|
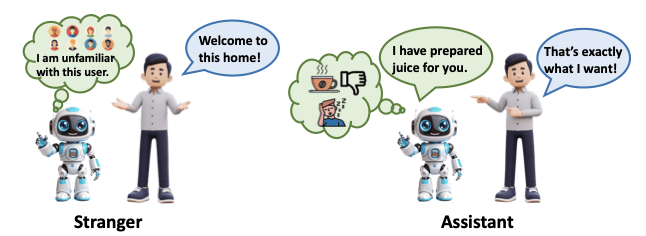
| From Strangers to Assistants: Fast Desire Alignment for Embodied Agent-User Adaptation
Yuanfei Wang, Xinju Huang, Fangwei Zhong, Yaodong Yang, Yizhou Wang, Yuanpei Chen, Hao Dong arXiv 2025 [Paper] |
|
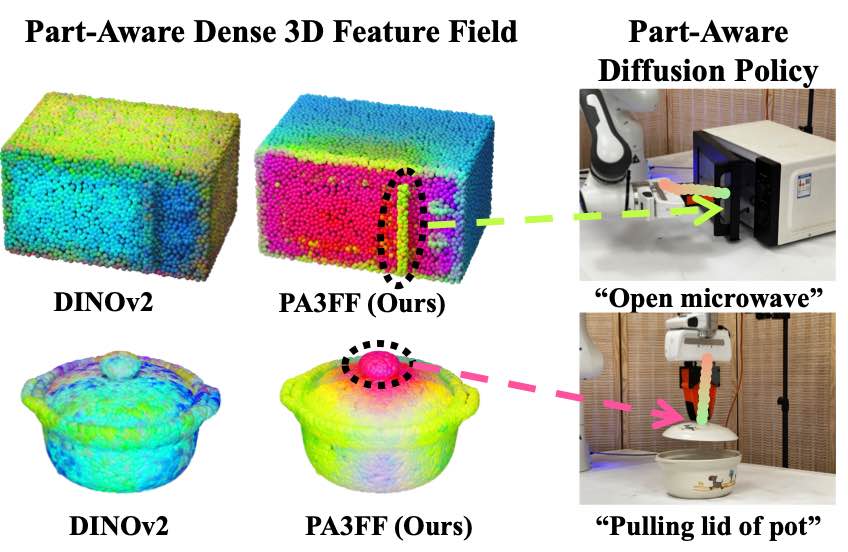
| PA3FF: Learning Part-Aware Dense 3D Feature Field For Generalizable Articulated Object Manipulation
Yue Chen, Muqing Jiang, Ruihai Wu, Kaifeng Zheng, Jiaqi Liang, Chenrui Tie, Haoran Lu, Hao Dong International Conference on Learning Representations (ICLR) 2026 [Paper] |
|
| SpikeStereoNet: A Brain-Inspired Framework for Stereo Depth Estimation from Spike Streams
Zhuoheng Gao, Yihao Li, Jiyao Zhang, Rui Zhao, Tong Wu, Hao Tang, Zhaofei Yu, Hao Dong†, Guozhang Chen†, Tiejun Huang International Conference on Learning Representations (ICLR) 2026 [Paper] |
|
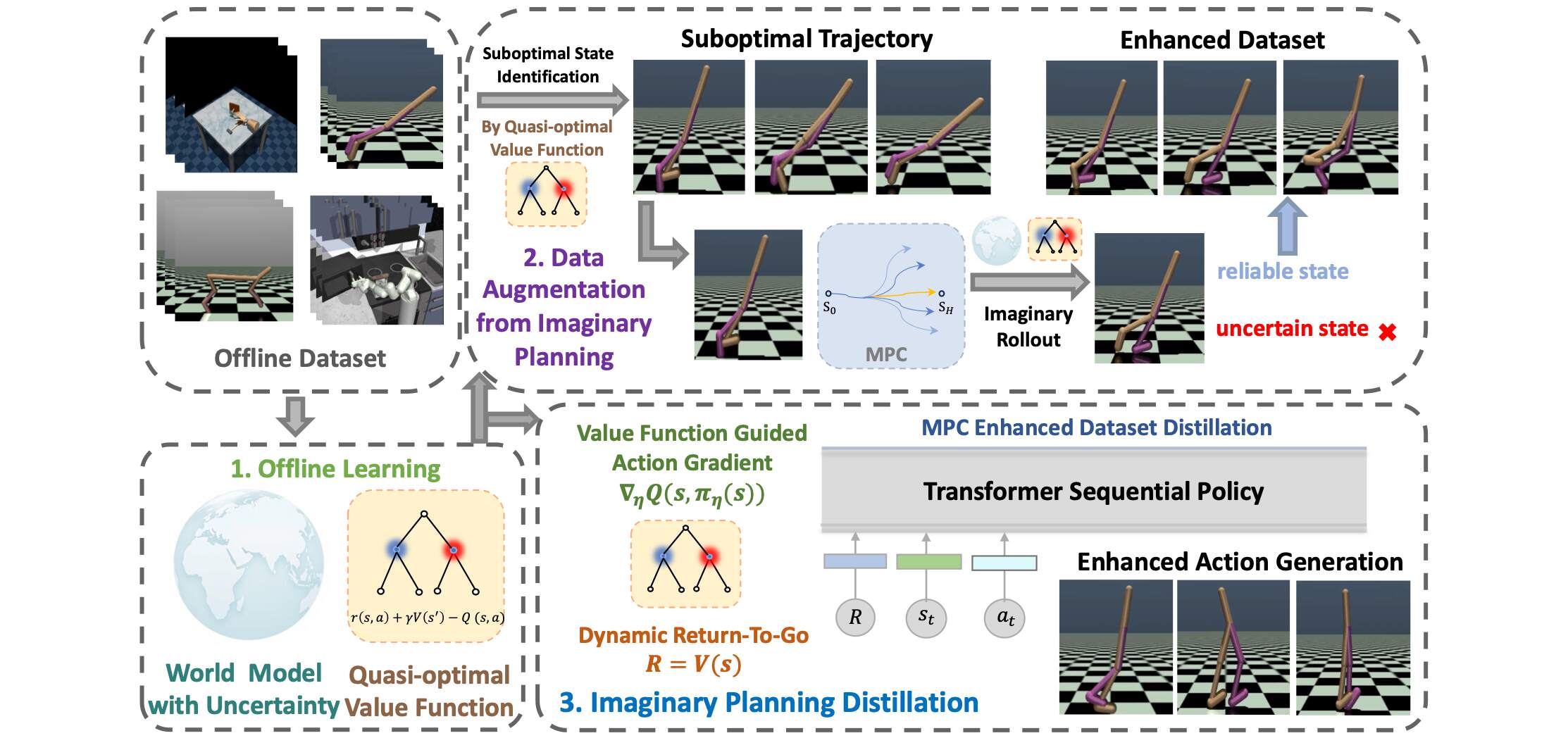
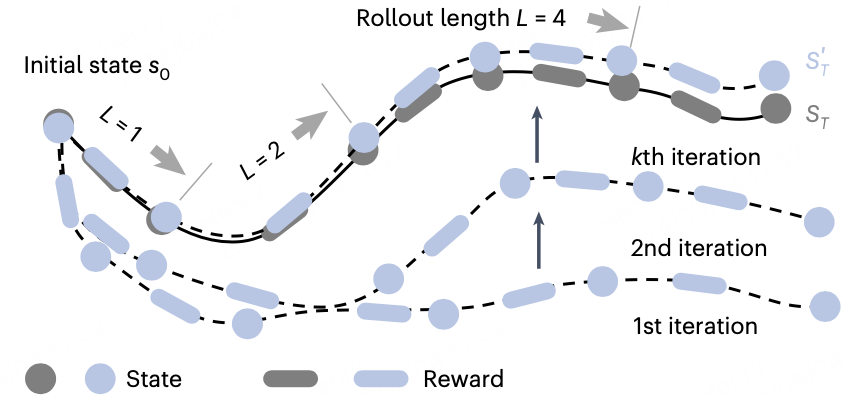
| IPD: Boosting Sequential Policy with Imaginary Planning Distillation in Offline Reinforcement Learning
Yihao Oin ,Yuanfei Wang,Hang Zhou, Peiran Liu, Hao Dong*, Yiding Ji* International Conference on Autonomous Agents andMulti-Agent Systems (AAMAS) 2026 [Paper] |
|
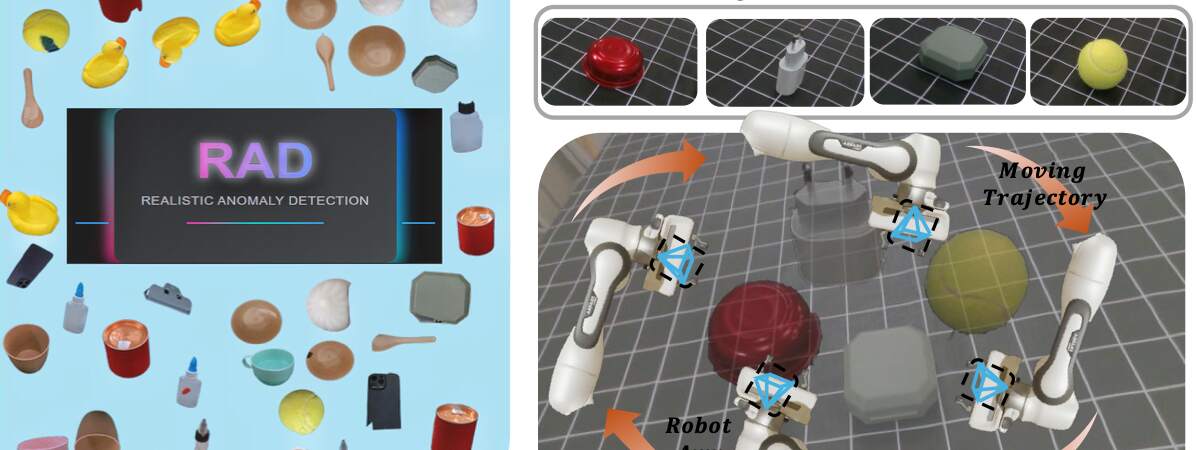
| RAD: A Realistic Multi-View Benchmark for Pose-Agnostic Anomaly Detection
Kaichen Zhou, Xinhai Chang, Taewhan Kim, Jiadong Zhang, Yang Cao, Chufei Peng, Fangneng Zhan, Hao Zhao, Hao Dong2, Kai Ming Ting, Ye Zhu IEEE Robotics and Automation Letters (RAL) 2026 [Paper] [Code] |
|
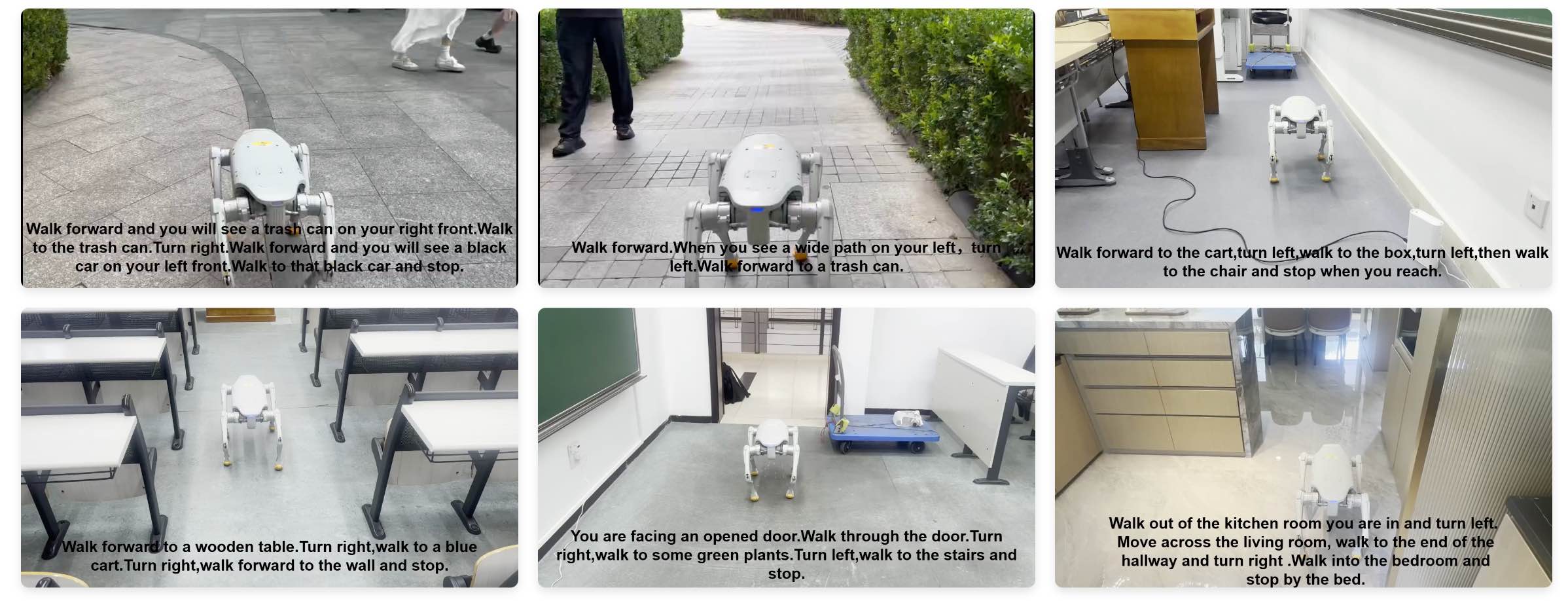
| CorrectNav: Self-Correction Flywheel Empowers Vision-Language-Action Navigation Model
Zhuoyuan Yu, Yuxing Long, Zihan Yang, Chengyan Zeng, Hongwei Fan, Jiyao Zhang, Hao Dong AAAI Conference on Artificial Intelligence 2026 [Paper] [Webpage] |
|
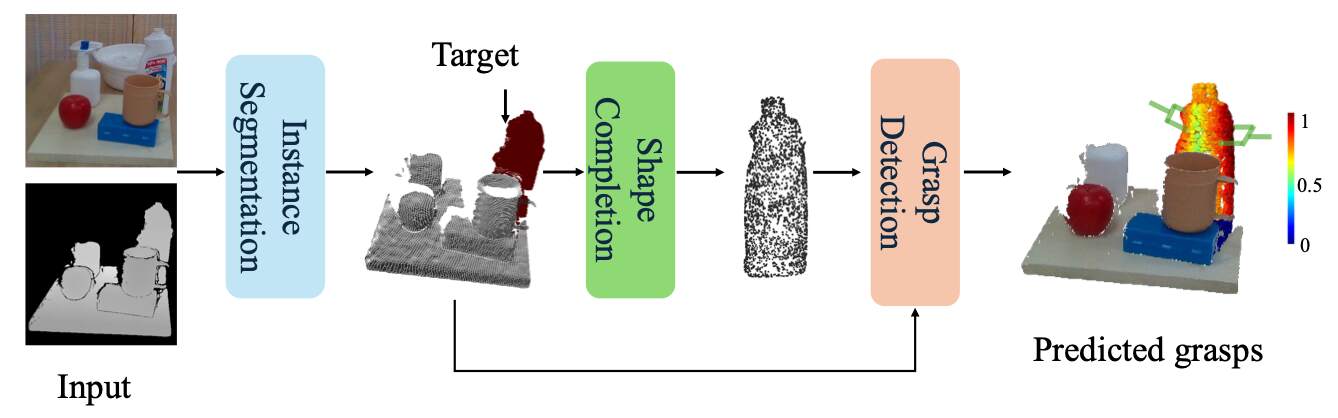
| TARGO: Benchmarking Target-driven Object Grasping under Occlusions
Yan Xia, Ran Ding, Ziyuan Qin, Guanqi Zhan, Kaichen Zhou, Long Yang, Hao Dong, Daniel Cremers International Journal of Computer Vision (IJCV) 2025 [Paper] [Webpage] |
|
| DexGarmentLab: Dexterous Garment Manipulation Environment with Generalizable Policy
--- Best Paper Finalist - IROS 2025 Workshop on Robotic Manipulation of Deformable Objects Yuran Wang, Ruihai Wu, Yue Chen. Jiarui Wang, Jiaqi Liang, Ziyu Zhu, Haoran Geng, Jitendra Malik, Pieter Abbeel, Hao Dong Neural Information Processing System (NeurIPS) 2025 (Spotlight, 688 over 21575 valid submissions) [Paper] [Webpage] [Code] [Data] [机器之心] |
|
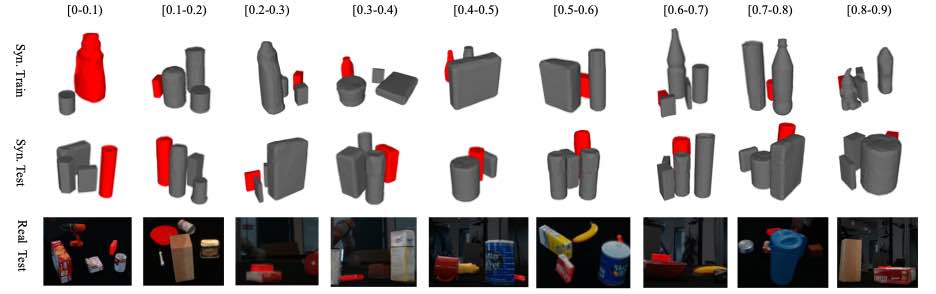
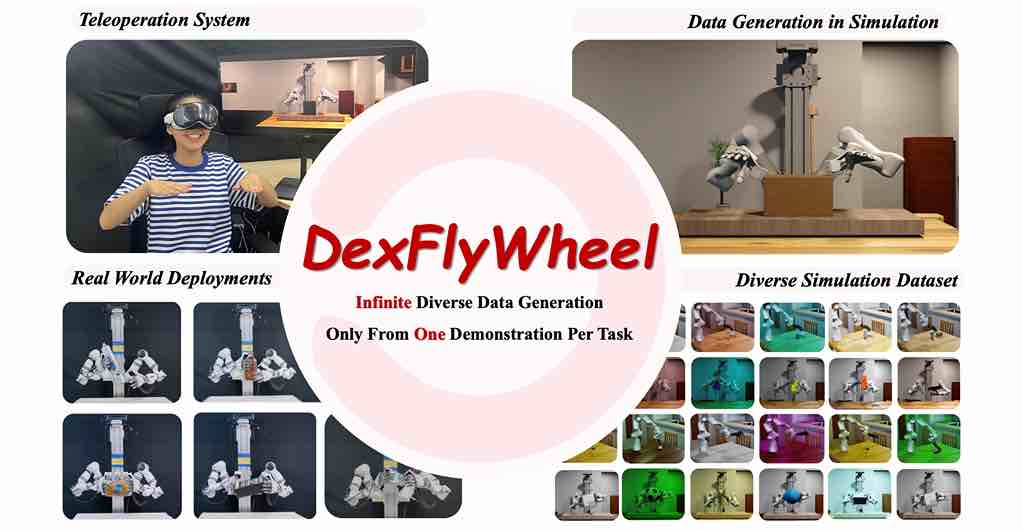
| DexFlyWheel: A Scalable and Self-improving Data Generation Framework for Dexterous Manipulation
Kefei Zhu, Fengshuo Bai, YuanHao Xiang, Yishuai Cai, Xinglin Chen, Ruochong Li, Xingtao Wang, Hao Dong, Yaodong Yang, Xiaopeng Fan, Yuanpei Chen Neural Information Processing System (NeurIPS) 2025 (Spotlight, 688 over 21575 valid submissions) [Paper] [Webpage] |
|
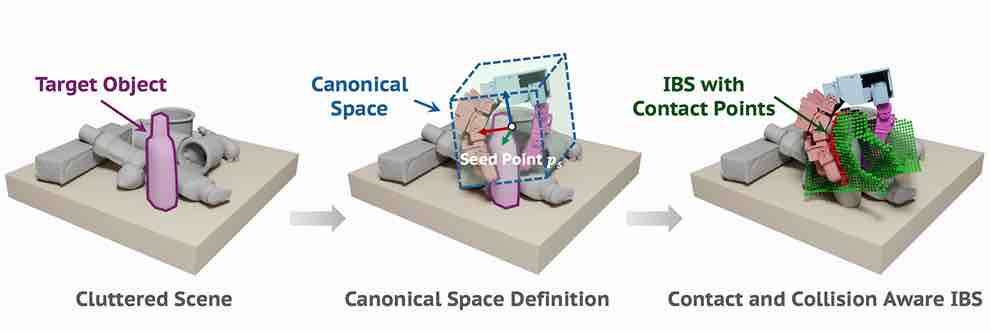
| CADGrasp: Learning Contact and Collision Aware General Dexterous Grasping in Cluttered Scenes
Jiyao Zhang, Zhiyuan Ma, Tianhao Wu, Zeyuan Chen, Hao Dong Neural Information Processing System (NeurIPS) 2025 [Paper] [Webpage] [Code] |
|
| 3DS-VLA: A 3D Spatial-Aware Vision Language Action Model for Robust Multi-Task Manipulation
Xiaoqi Li, Liang Heng, Jiaming Liu, Yan Shen, Chenyang Gu, Zhuoyang Liu, Hao Chen, Nuowei Han, Renrui Zhang, Hao Tang, Shanghang Zhang, Hao Dong Conference on Robot Learning (CoRL) 2025 [Paper] [Code] |
|
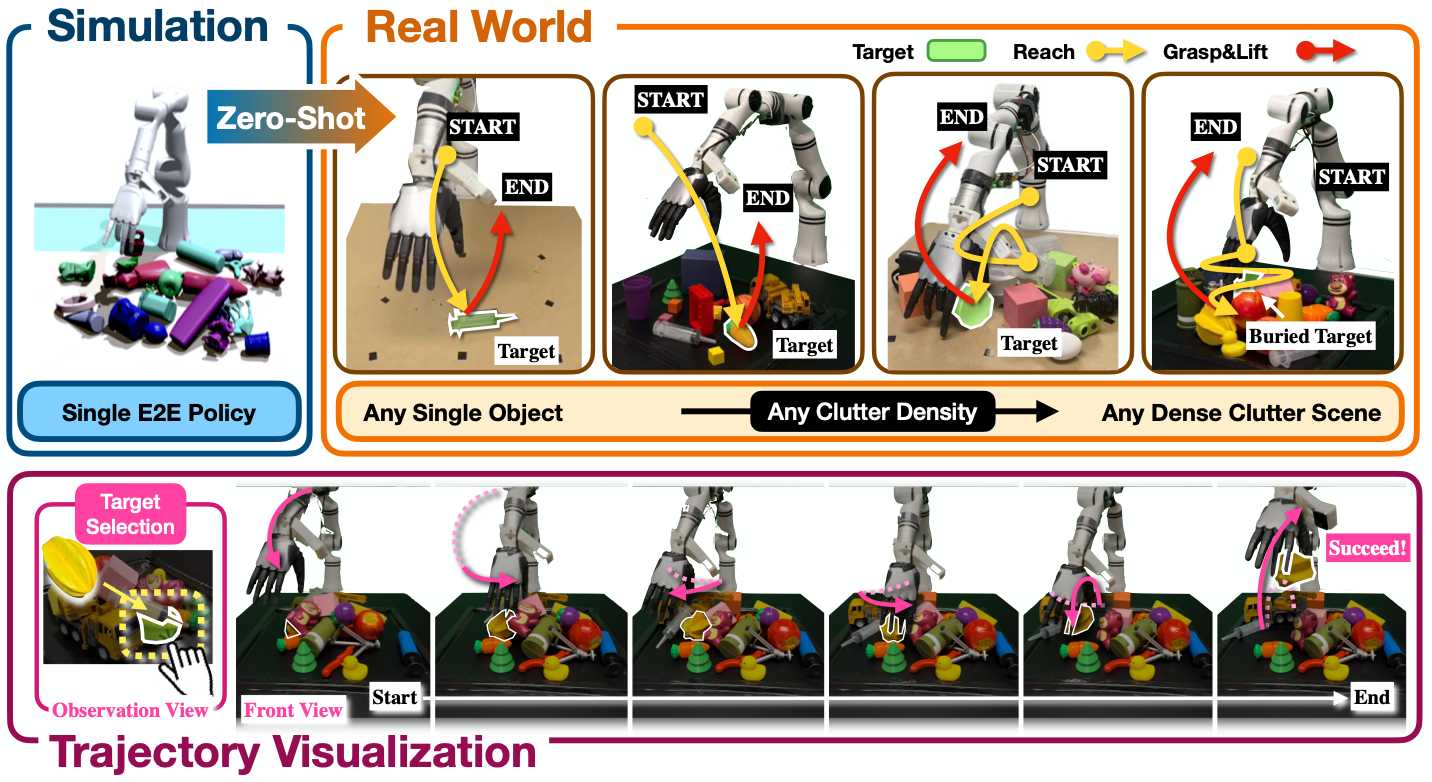
| ClutterDexGrasp: A Sim-to-Real System for General Dexterous Grasping in Cluttered Scenes
Zeyuan Chen, Qiyang Yan, Yuanpei Chen, Tianhao Wu, Jiyao Zhang, Zihan Ding, Jinzhou Li, Yaodong Yang, Hao Dong Conference on Robot Learning (CoRL) 2025 (Oral) [Paper] [Webpage] |
|
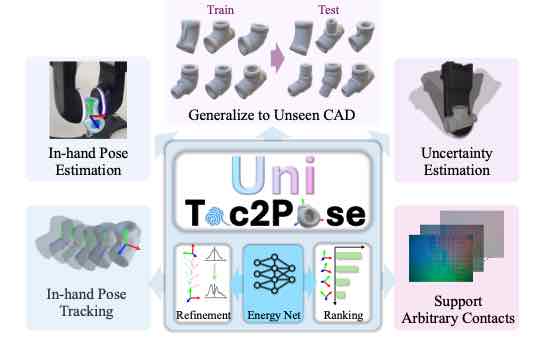
| UniTac2Pose: A Unified Approach Learned in Simulation for Generalizable Visuo-tactile In-hand Pose Estimation
Mingdong Wu, Long Yang, Jin Liu, Weiyao Huang, Lehong Wu, Zelin Chen, Daolin Ma, Hao Dong Conference on Robot Learning (CoRL) 2025 [Paper] |
|
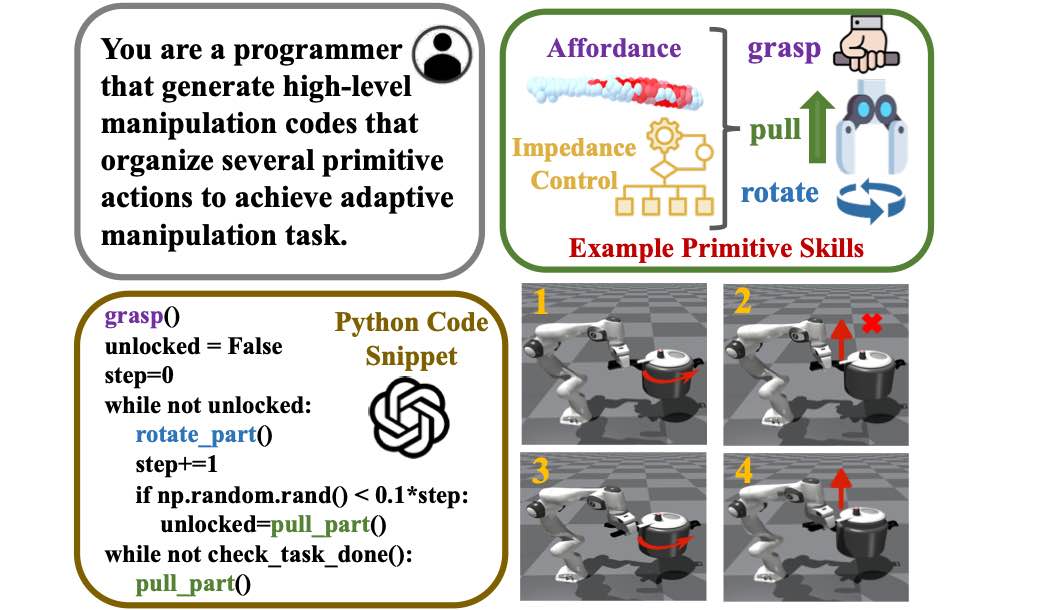
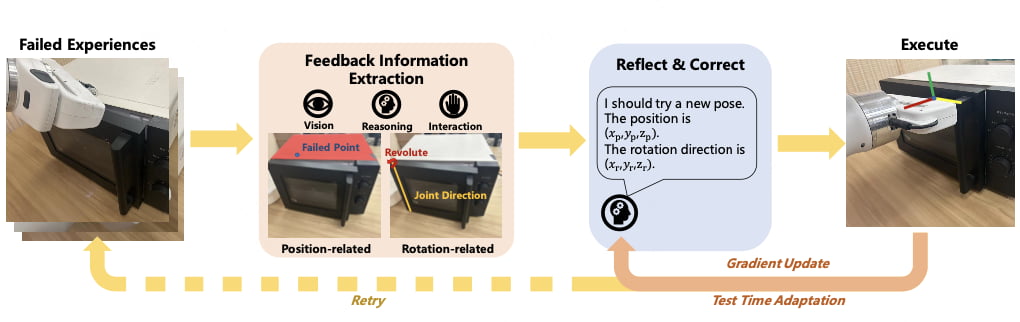
| AdaRPG: Adaptive Articulated Object Manipulation On The Fly with Foundation Model Reasoning and Part Grounding
Xiaojie Zhang, Yuanfei Wang, Ruihai Wu, Kunqi Xu, Yu Li, Liuyu Xiang, Hao Dong†, Zhaofeng He† International Conference on Computer Vision (ICCV) 2025 [Paper] [Webpage] |
|
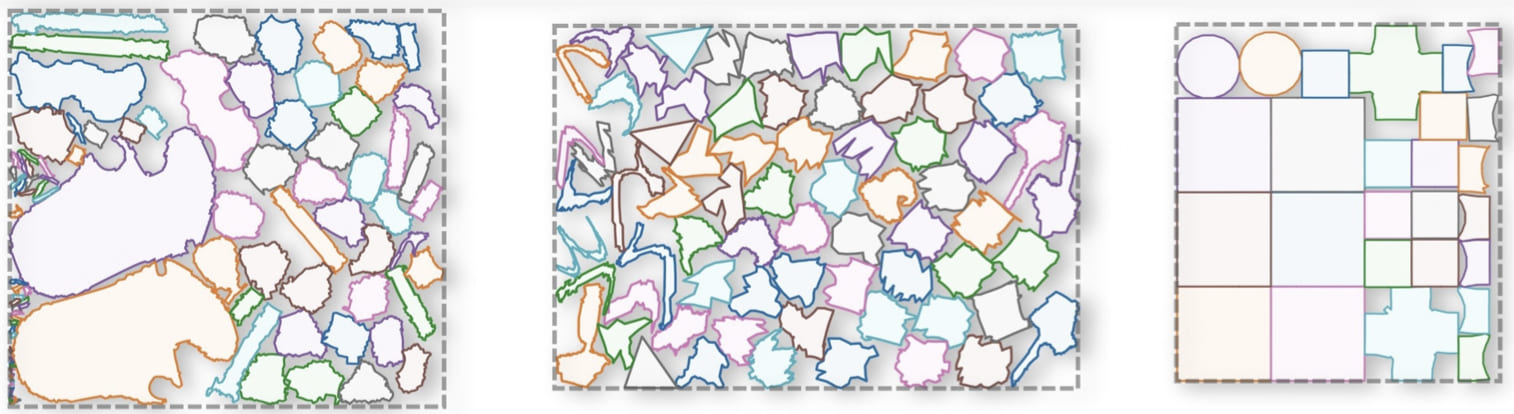
| GFPack++: Attention-Driven Gradient Fields for Optimizing 2D Irregular Packing
Tianyang Xue, Lin Lu, Yang Liu, Mingdong Wu, Hao Dong, Yanbin Zhang, Renmin Han, Baoquan Chen International Conference on Computer Vision (ICCV) 2025 (Highlight) [Paper] [Webpage] |
|
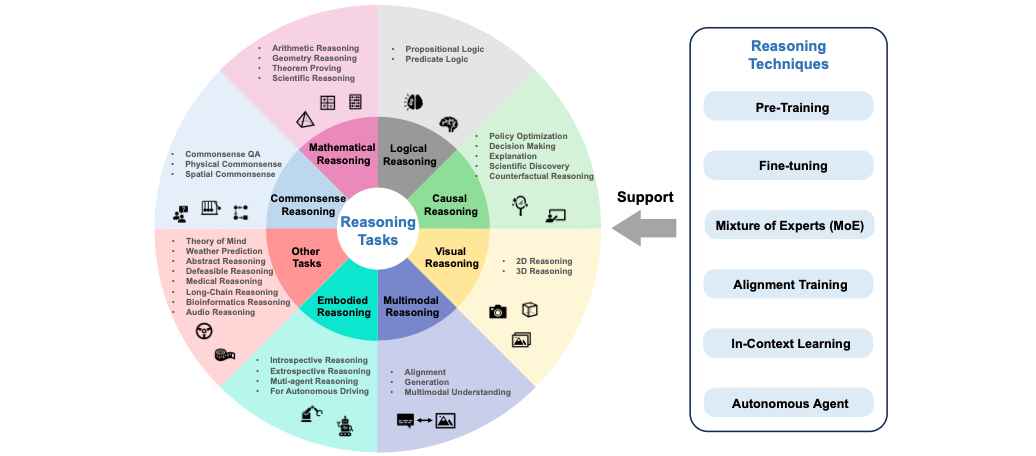
| A Survey of Reasoning with Foundation Models: Concepts, Methodologies, and Outlook
Jiankai Sun, Chuanyang Zheng, Enze Xie, Zhengying Liu, Ruihang Chu, Jianing Qiu, Jiaqi Xu, Mingyu Ding, Hongyang Li, Mengzhe Geng, Yue Wu, Wenhai Wang, Junsong Chen, Zhangyue Yin, Xiaozhe Ren, Jie Fu, Junxian He, Wu Yuan, Qi Liu, Xihui Liu, Yu Li, Hao Dong, Yu Cheng, Ming Zhang, Pheng Ann Heng, Jifeng Dai, Ping Luo, Jingdong Wang, Ji-Rong Wen, Xipeng Qiu, Yike Guo, Hui Xiong, Qun Liu, Zhenguo Li ACM Computing Surveys 2025 IF=23.8 [ACM Paper] [ArXiv] [Github] 
|
|
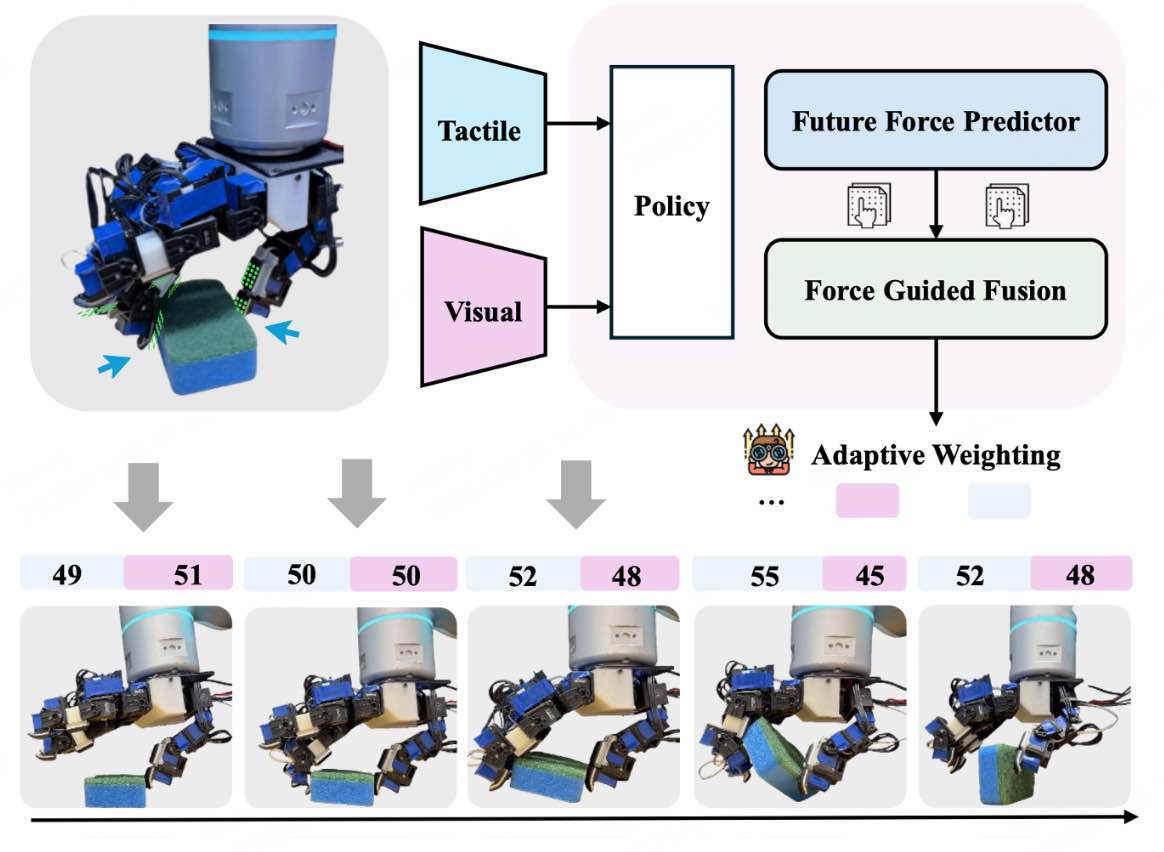
| Adaptac-Dex: Adaptive Visual-Tactile Fusion with Predictive Force Attention for Dexterous Manipulation
Jinzhou Li, Tianhao Wu, Jiyao Zhang, Zeyuan Chen, Haotian Jin, Mingdong Wu, Yujun Shen, Yaodong Yang, Hao Dong International Conference on Intelligent Robots and Systems (IROS) 2025 [Paper] [Webpage] [Hardware] |
|
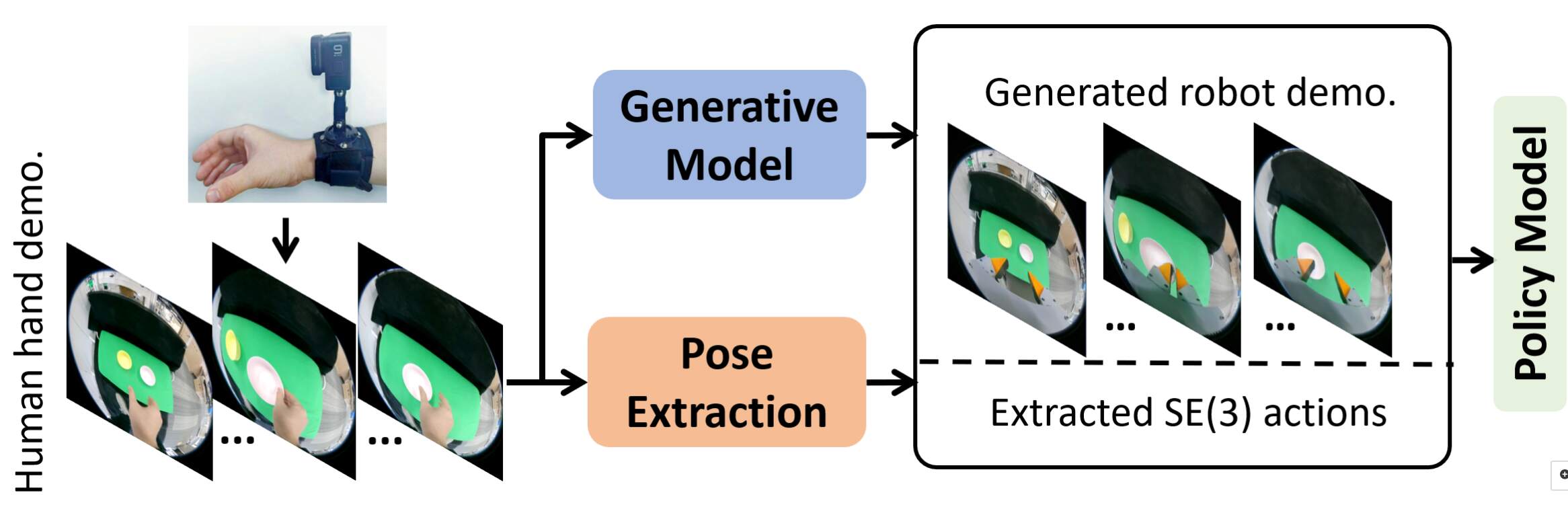
| RwoR: Generating Robot Demonstrations from Human Hand Collection for Policy Learning without Robot
Liang Heng, Xiaoqi Li, Shangqing Mao, Jiaming Liu, Ruolin Liu, Jingli Wei, Yu-Kai Wang, Jia Yueru, Chenyang Gu, Rui Zhao, Shanghang Zhang, Hao Dong International Conference on Intelligent Robots and Systems (IROS) 2025 [Paper] [Webpage] |
|
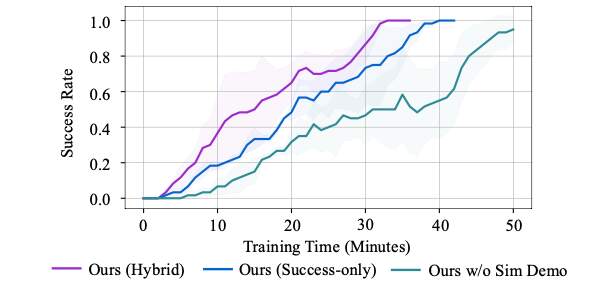
| SimLauncher: Launching Sample-Efficient Real-world Robotic Reinforcement Learning via Simulation Pre-training
Mingdong Wu, Lehong Wu, Yizhuo Wu, Weiyao Huang, Hongwei Fan, Zheyuan Hu, Haoran Geng, Jinzhou Li, jiahe ying, Long Yang, Yuanpei Chen, Hao Dong International Conference on Intelligent Robots and Systems (IROS) 2025 [Paper] [Webpage] |
|
| ManipGPT: Is Affordance Segmentation by Large Vision Models Enough for Articulated Object Manipulation?
Taewhan Kim, Hojin Bae, Zeming Li, Xiaoqi Li, Iaroslav Ponomarenko, Ruihai Wu, Hao Dong International Conference on Intelligent Robots and Systems (IROS) 2025 [Paper] [Webpage] |
|
| SR3D: Unleashing Single-view 3D Reconstruction for Transparent and Specular Object Grasping
Mingxu Zhang, Xiaoqi Li, Jiahui Xu, Kaichen Zhou, Hojin Bae, Yan Shen, Chuyan Xiong, Jiaming Liu, Hao Dong International Conference on Intelligent Robots and Systems (IROS) 2025 [Paper] [Webpage] |
|
| LLM2Rewards: Boosting Universal LLM Reward Design through Heuristic Reward Observation Space Evolution
Zen Kit Heng, Zimeng Zhao, Tianhao Wu, Yuanfei Wang, Mingdong Wu, Yangang Wang, Hao Dong arXiv 2025 [Paper] [Webpage] [Code] |
|
| BiAssemble: Learning Collaborative Affordance for Bimanual Geometric Assembly
--- Distinguished Workshop Paper Award - IROS 2025 Workshop on Frontiers in Dynamic, Intelligent, and Adaptive Multi-arm Manipulation Yan Shen, Ruihai Wu, Yubin Ke, Xinyuan Song, Zeyi Li, Xiaoqi Li, Hongwei Fan, Haoran Lu, Hao Dong International Conference on Machine Learning (ICML) 2025 [Paper] [Webpage] [Code] [Data] |
|
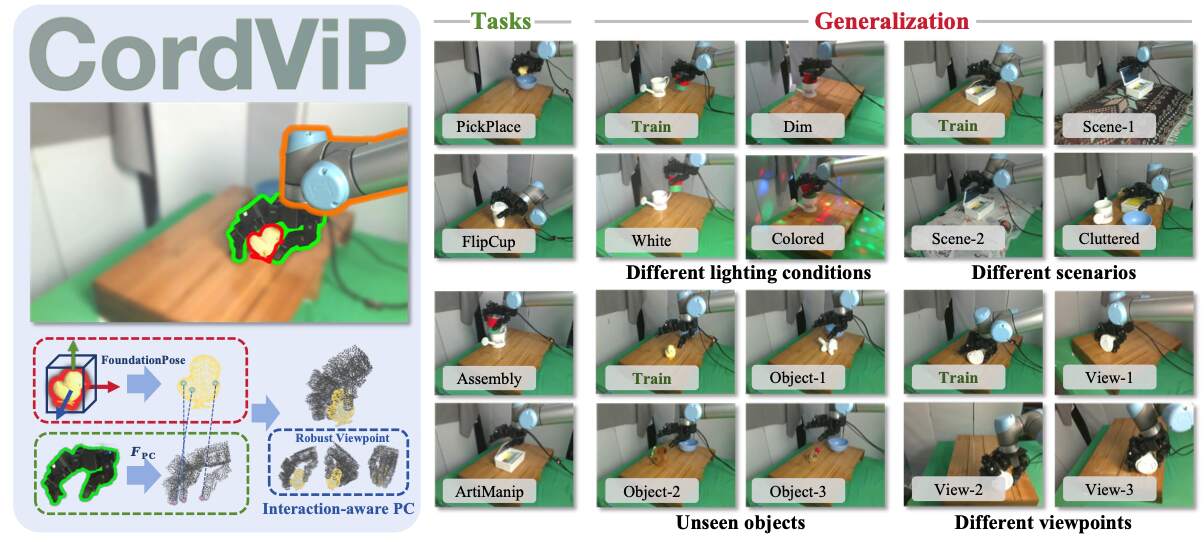
| CordViP: Correspondence-based Visuomotor Policy for Dexterous Manipulation in Real-World
Yankai Fu, Qiuxuan Feng, Ning Chen, Zichen Zhou, Mengzhen Liu, Mingdong Wu, Tianxing Chen, Shanyu Rong, Jiaming Liu, Hao Dong, Shanghang Zhang Robotics: Science and Systems (RSS) 2025 [Paper] [Webpage] [Code] |
|
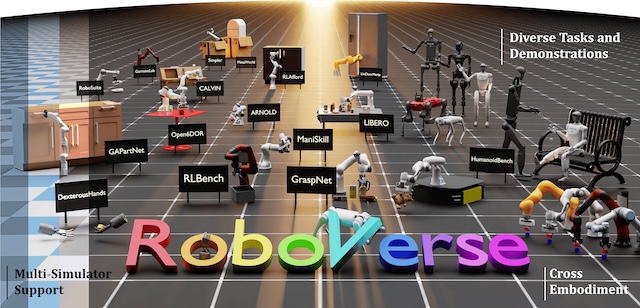
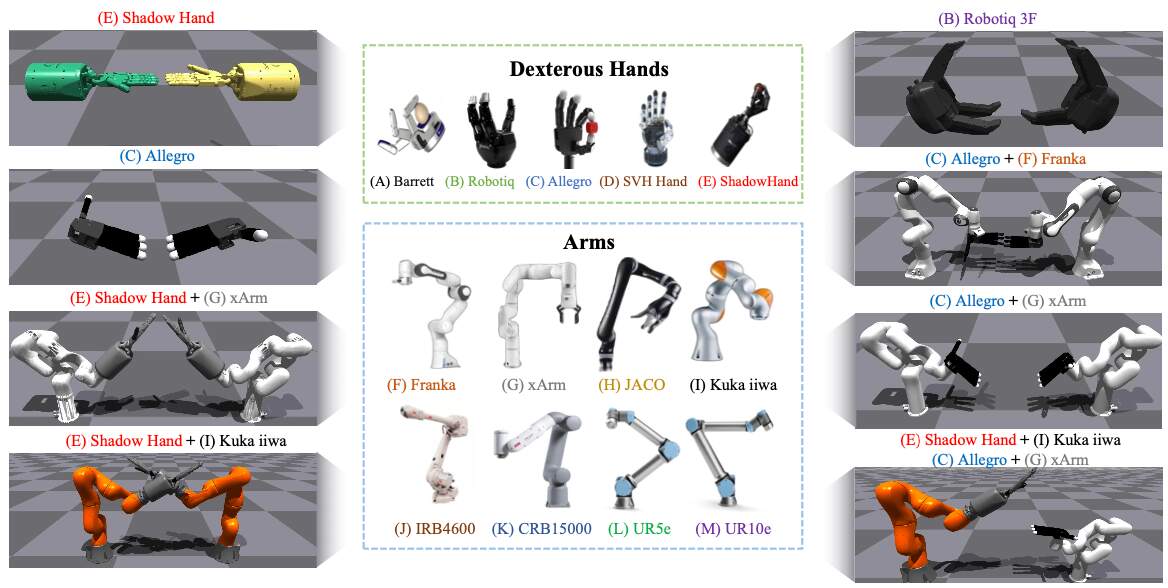
| ROBOVERSE: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning
Haoran Geng, Feishi Wang, Songlin Wei, Yuyang Li, Bangjun Wang, Boshi An, Charlie Tianyue Cheng, Haozhe Lou, Peihao Li, Yen-Jen Wang, Yutong Liang, Dylan Goetting , Chaoyi Xu, Haozhe Chen, Yuxi Qian, Yiran Geng, Jiageng Mao, Weikang Wan, Mingtong Zhang , Jiangran Lyu, Siheng Zhao, Jiazhao Zhang, Jialiang Zhang, Chengyang Zhao, Haoran Lu , Yufei Ding, Ran Gong, Yuran Wang, Yuxuan Kuang, Ruihai Wu, Baoxiong Jia, Carlo Sferrazza Hao Dong, Siyuan Huang, Koushil Sreenath, Yue Wang, Jitendra Malik, Pieter Abbeel Robotics: Science and Systems (RSS) 2025 [Paper] [Webpage] [Document] [Code]  [机器之心]
[机器之心]
|
|
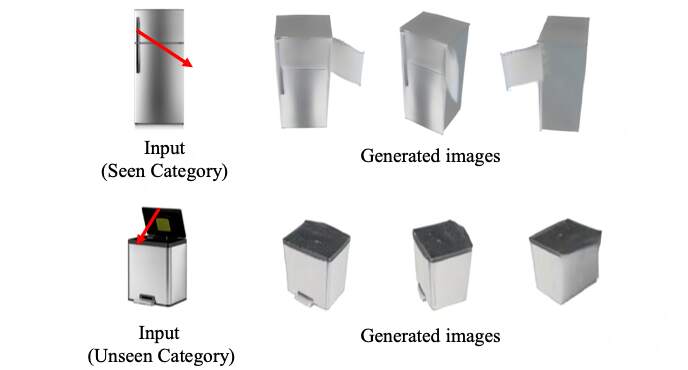
| PartRM: Modeling Part-Level Dynamics with Large 4D Reconstruction Model
Mingju Gao, Yike Pan, Huan-ang Gao, Zongzheng Zhang, Wenyi Li, Hao Dong, Hao Tang, Li Yi, Hao Zhao Conference on Computer Vision and Pattern Recognition (CVPR) 2025 [Paper] [Webpage] [Code] |
|
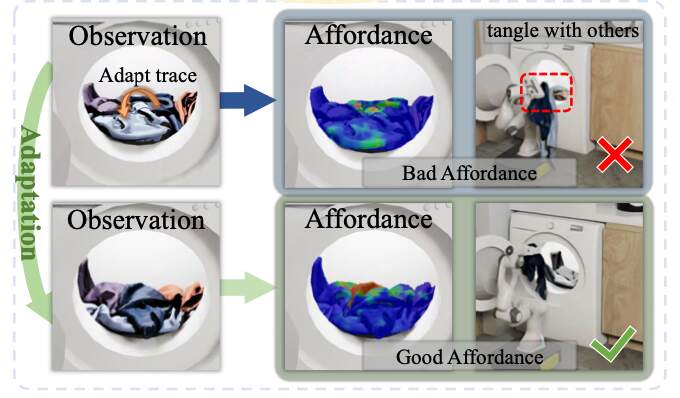
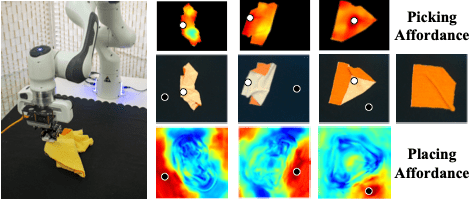
| GarmentPile: Point-Level Visual Affordance Guided Retrieval and Adaptation for Cluttered Garments Manipulation
--- Best Paper Finalist - IROS 2025 Workshop on Robotic Manipulation of Deformable Objects Ruihai Wu, Ziyu Zhu, Yuran Wang, Yue Chen, Jiarui Wang, Hao Dong Conference on Computer Vision and Pattern Recognition (CVPR) 2025 [Paper] [Webpage] [Code] [北大公众号] |
|
| CheckManual: A New Challenge and Benchmark for Manual-based Appliance Manipulation
--- The first benchmark for manual-based appliance manipulation Yuxing Long, Jiyao Zhang, Mingjie Pan, Tianshu Wu, Taewhan Kim, Hao Dong Conference on Computer Vision and Pattern Recognition (CVPR) 2025 (Highlight) [Paper] [Webpage] [Code] |
|
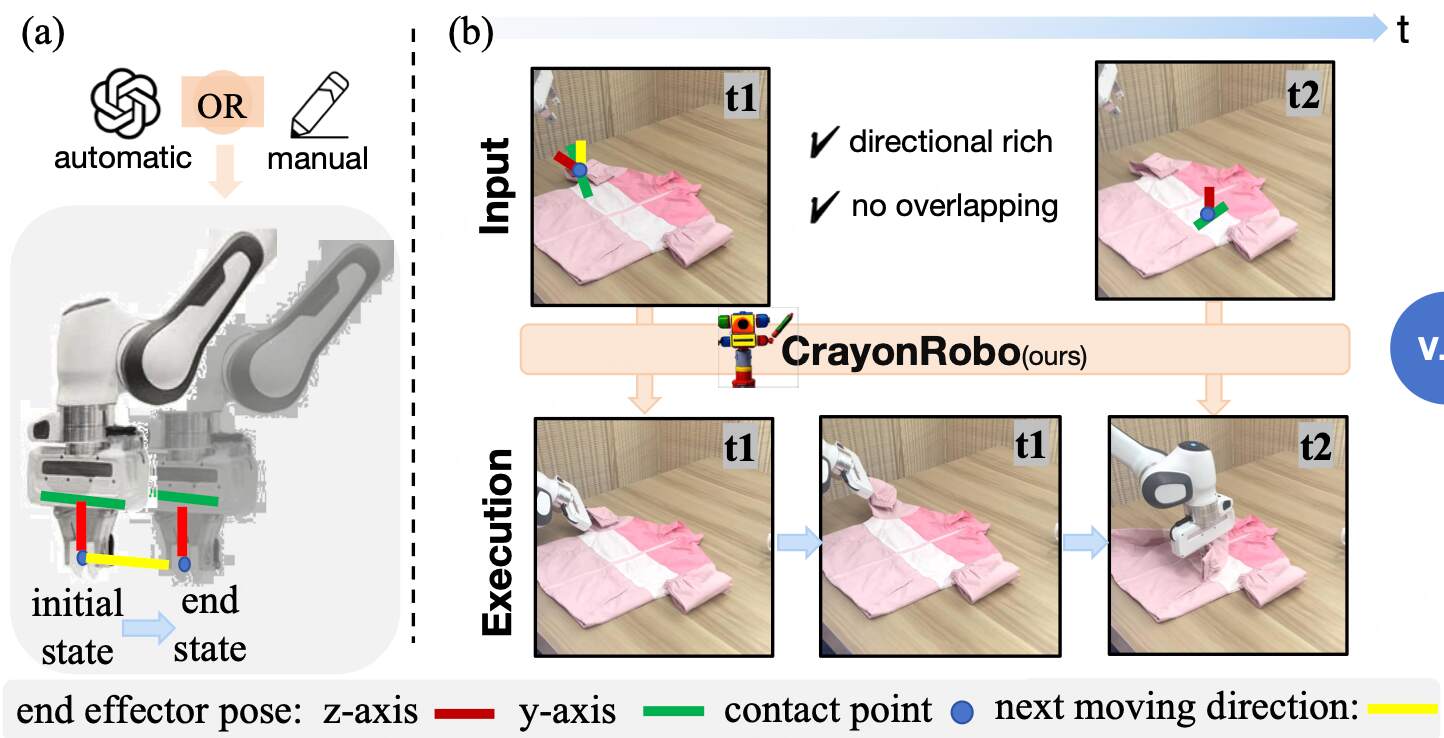
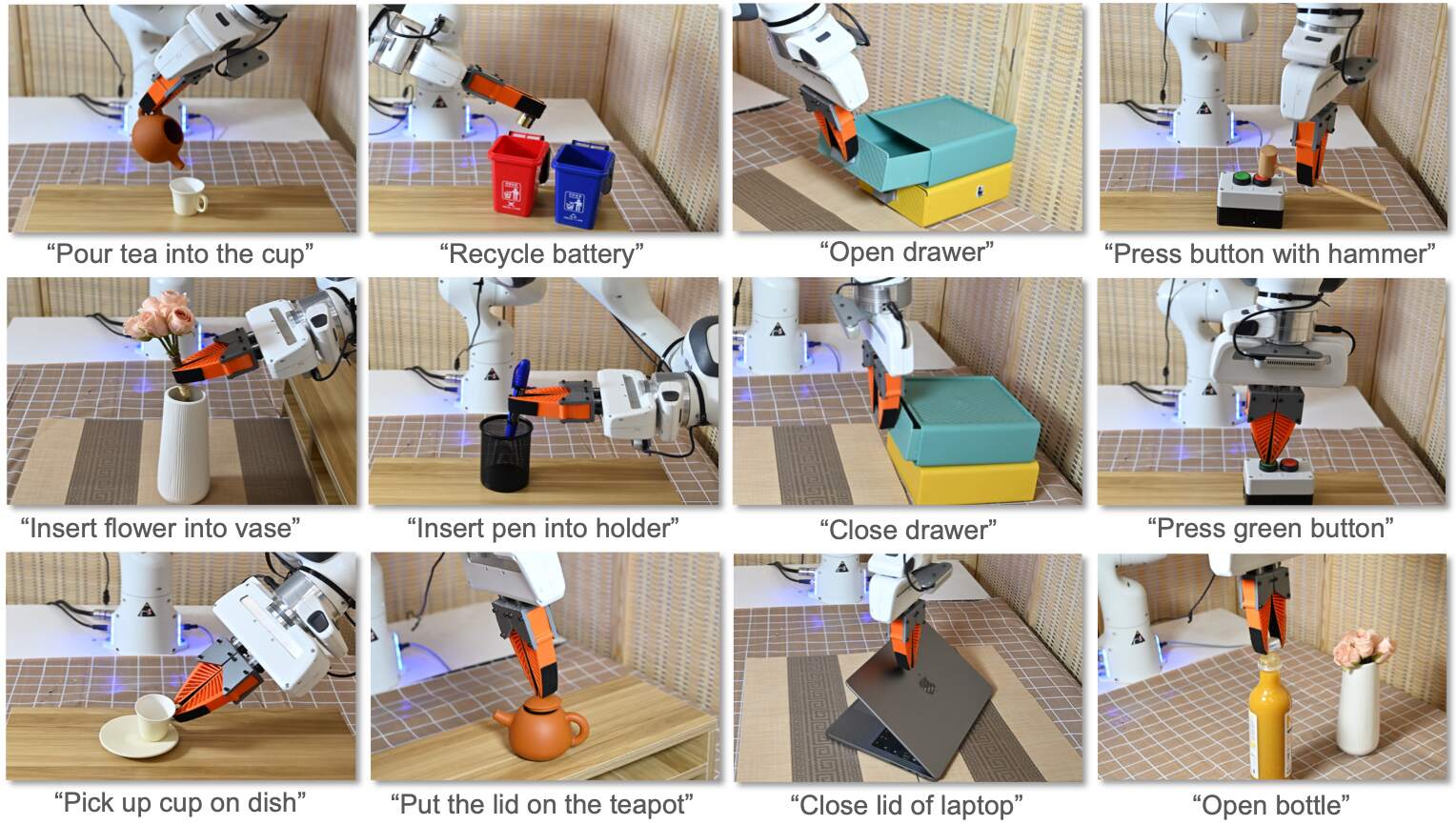
| CrayonRobo: Object-Centric Prompt-Driven Vision-Language-Action Model for Robotic Manipulation
Xiaoqi Li, Lingyun Xu, Mingxu Zhang, Jiaming Liu, Yan Shen, Iaroslav Ponomarenko, Jiahui Xu, Liang Heng, Siyuan Huang, Shanghang Zhang, Hao Dong Conference on Computer Vision and Pattern Recognition (CVPR) 2025 [Paper] [Webpage] [Code] [公众号] |
|
| OmniManip: Towards General Robotic Manipulation via Object-Centric Interaction Primitives as Spatial Constraints
Mingjie Pan, Jiyao Zhang, Tianshu Wu, Yinghao Zhao, Wenlong Gao, Hao Dong Conference on Computer Vision and Pattern Recognition (CVPR) 2025 (Highlight) [Paper] [Webpage] [公众号] |
|
| SplatMesh: Interactive 3D Segmentation and Editing Using Mesh-Based Gaussian Splatting
Kaichen Zhou, Lanqing Hong, Xinhai Chang, Yingji Zhong, Enze Xie, Hao Dong, Zhihao Li, Yongxin Yang, Zhenguo Li, Wei Zhang Conference on Computer Vision and Pattern Recognition (CVPR) Workshop 2025 [Paper] |
|
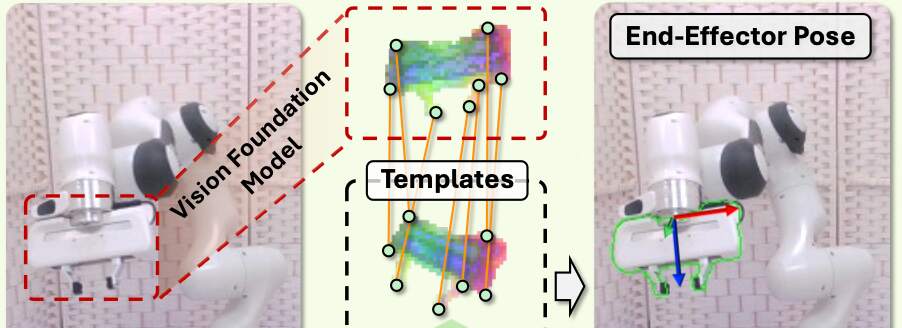
| FEEPE: Foundation Feature-Driven Online End-Effector Pose Estimation: A Marker-Free and Learning-Free Approach
Tianshu Wu, Jiyao Zhang, Sheldon Liang, Zhengxiao Han, Hao Dong International Conference on Robotics and Automation (ICRA) 2025 [Paper] [Webpage] [Code] |
|
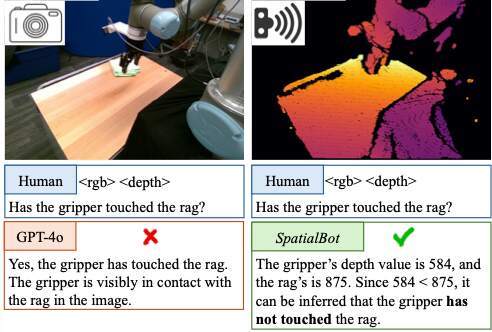
| SpatialBot: Precise Spatial Understanding with Vision Language Models
Wenxiao Cai, Yaroslav Ponomarenko, Jianhao Yuan, Xiaoqi Li, Wankou Yang, Hao Dong, Bo Zhao International Conference on Robotics and Automation (ICRA) 2025 [Paper] [Code] [机器之心] |
|
| TransDiff: Diffusion-Based Method for Manipulating Transparent Objects Using a Single RGB-D Image
Haoxiao Wang, Kaichen Zhou, Binrui Gu, ZhiYuan Feng, Weijie Wang, Peilin Sun, Yicheng Xiao, Jianhua Zhang, Hao Dong International Conference on Robotics and Automation (ICRA) 2025 [Paper] [Webpage] [Code] |
|
| 3DTacDex: Canonical Representation and Force-Based Pretraining of 3D Tactile for Dexterous Visuo-Tactile Policy Learning
Tianhao Wu, Jinzhou Li, Jiyao Zhang, Mingdong Wu, Hao Dong International Conference on Robotics and Automation (ICRA) 2025 [Paper] [Webpage] [Code] [Policy] [Teleoperation] |
|
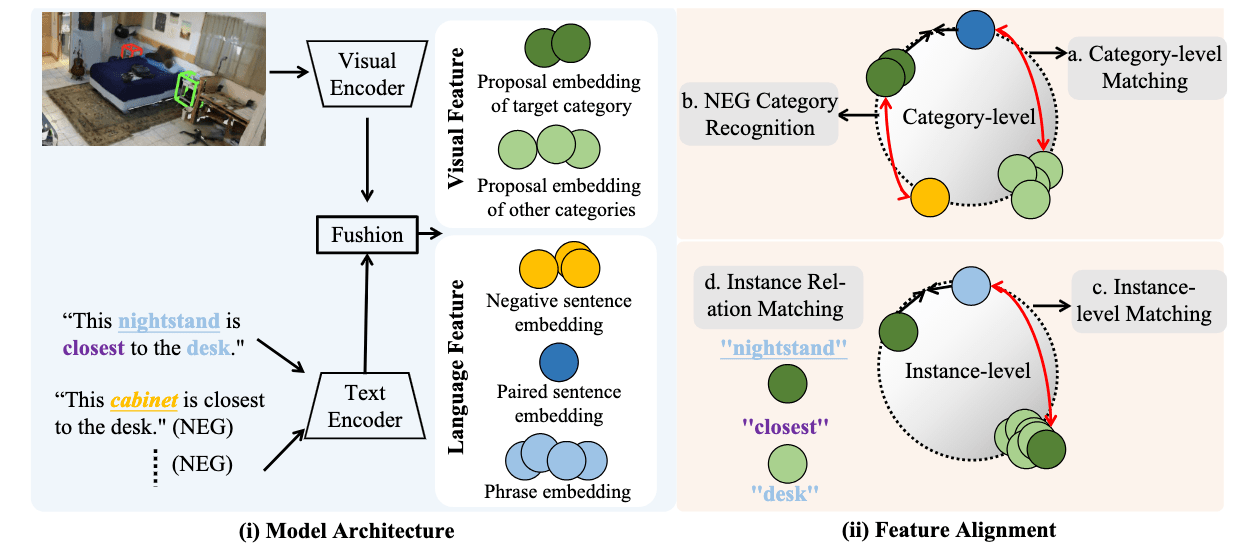
| 3DWG: 3D Weakly Supervised Visual Grounding via Category and Instance-Level Alignment
Xiaoqi Li, Jiaming Liu, Nuowei Han, Liang Heng, Yandong Guo, Hao Dong, Yang Liu International Conference on Robotics and Automation (ICRA) 2025 [Paper] |
|
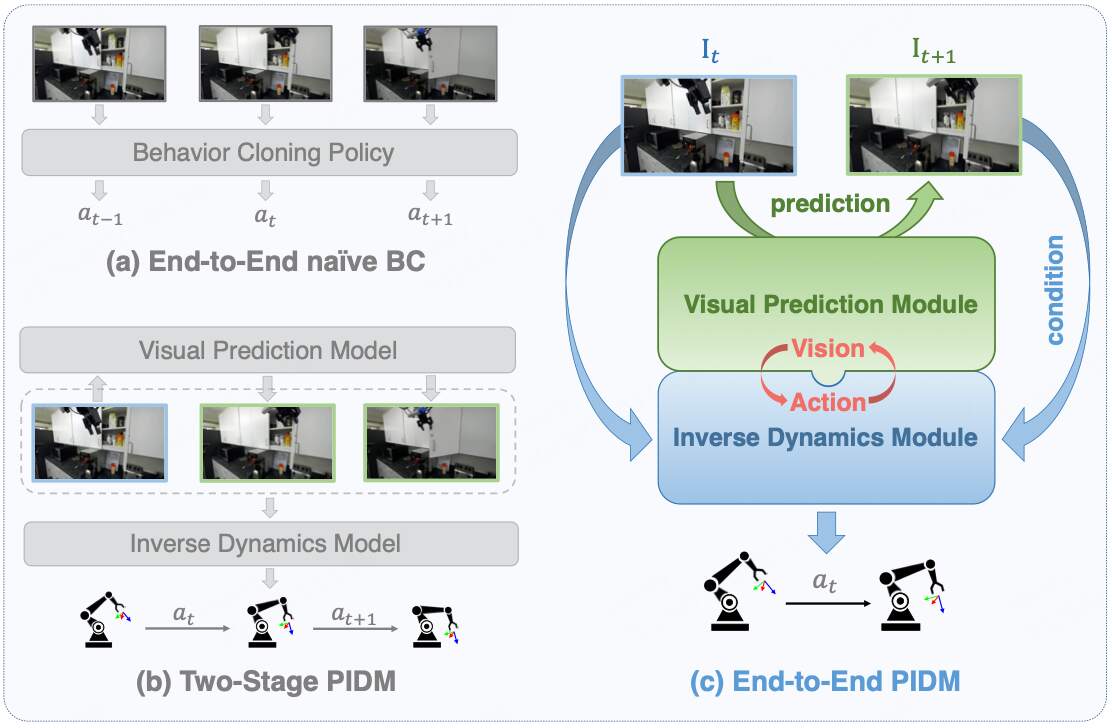
| Seer: Predictive Inverse Dynamics Models are Scalable Learners for Robotic Manipulation
Yang Tian, Sizhe Yang, Jia Zeng, Ping Wang, Dahua Lin, Hao Dong, Jiangmiao Pang International Conference on Learning Representations (ICLR) 2025 (Oral 1.8%) [Paper] [Webpage] [Code] |
|
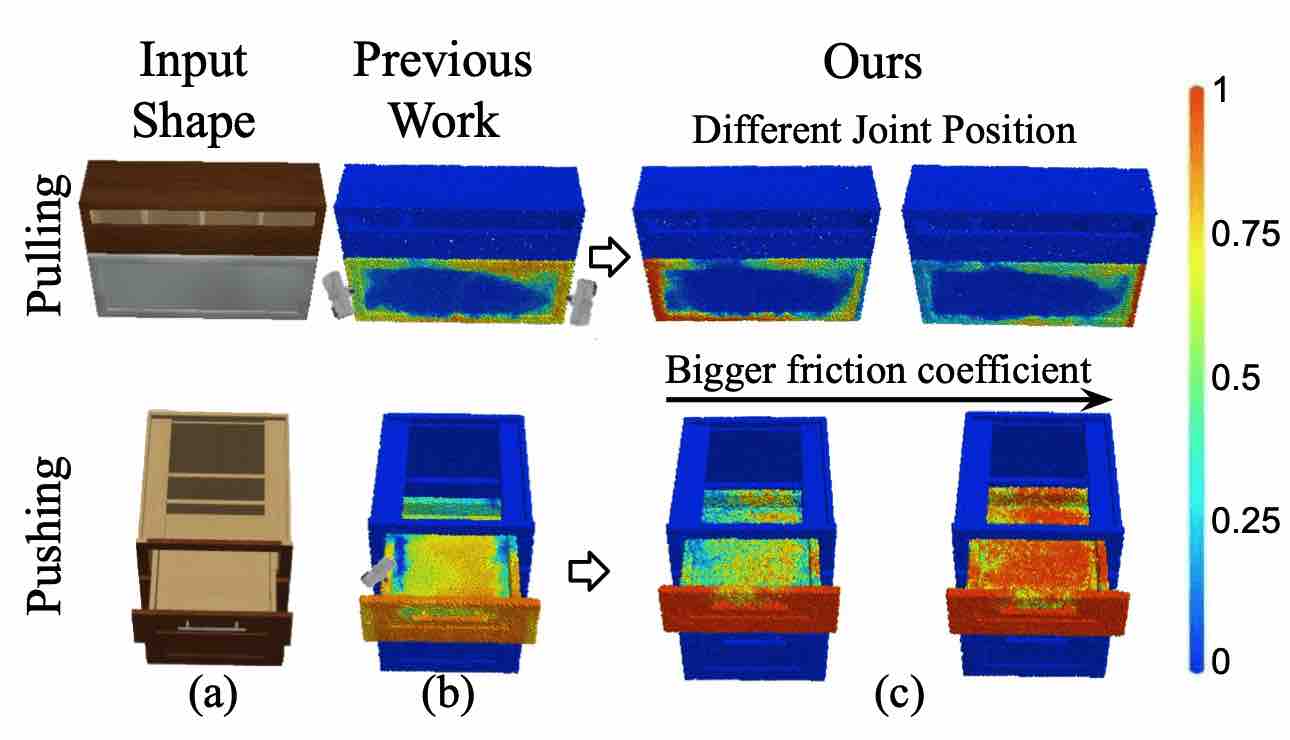
| AdaManip: Adaptive Articulated Object Manipulation Environments and Policy Learning
Yuanfei Wang, Xiaojie Zhang, Ruihai Wu, Yu Li, Yan Shen, Mingdong Wu, Zhaofeng He, Yizhou Wang, Hao Dong International Conference on Learning Representations (ICLR) 2025 [Paper] [Webpage] [Code] |
|
| ET-SEED: Efficient Trajectory-Level SE(3) Equivariant Diffusion Policy
Chenrui Tie, Yue Chen, Ruihai Wu, Boxuan Dong, Zeyi Li, Chongkai Gao, Hao Dong International Conference on Learning Representations (ICLR) 2025 [Paper] [Webpage] [Code] |
|
| Efficient and Scalable Reinforcement Learning for Large-scale Network Control
--- UKRI AI & Robotics Research Awards 2026 Best Research Paper Chengdong Ma, Aming Li, Yali Du, Hao Dong, Yaodong Yang Nature Machine Intelligence (NMI) 2024 [Paper] [新华网] [科技日报] |
|
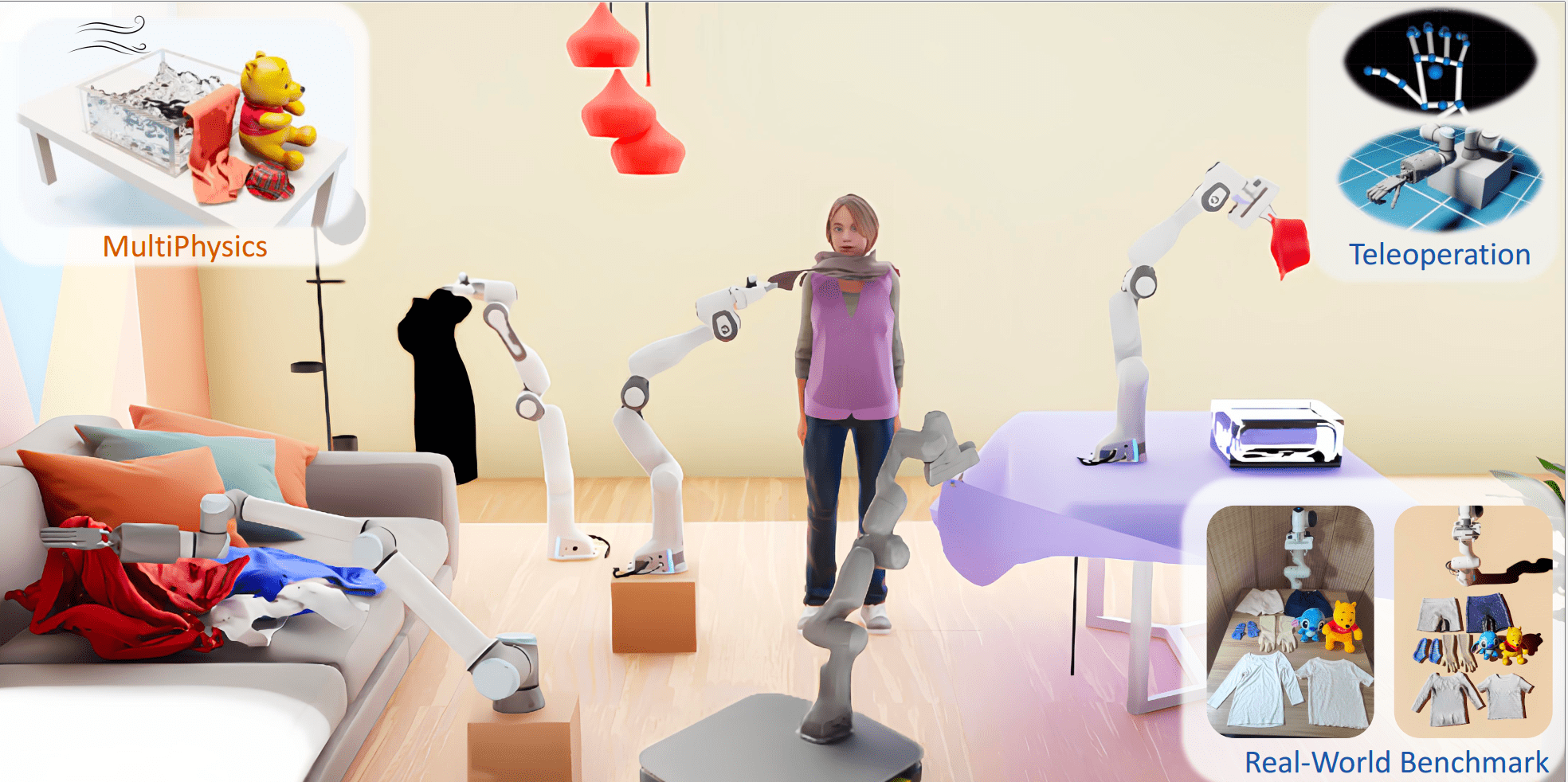
| GarmentLab: A Unified Simulation and Benchmark for Garment Manipulation
--- Excellent Undergraduate Thesis Supervising Teacher Award @ PKU 2025 Haoran Lu, Yitong Li, Ruihai Wu, Sijie Li, Ziyu Zhu, Chuanruo Ning, Yan Shen, Longzan Luo, Yuanpei Chen, Hao Dong Neural Information Processing System (NeurIPS) 2024 [Paper] [Webpage] [Code] [Docs] [公众号] |
|
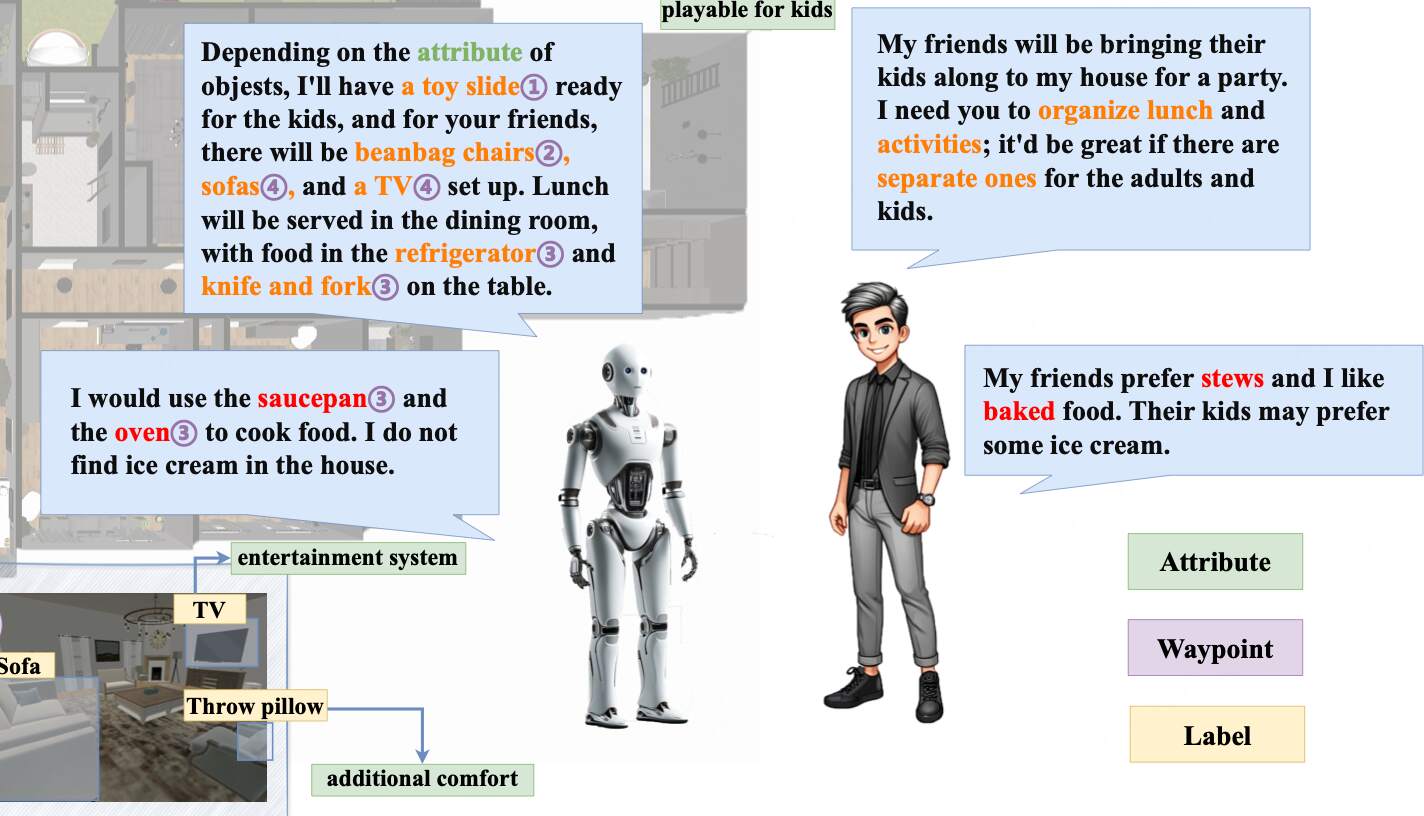
| MO-DDN: A Coarse-to-Fine Attribute-based Exploration Agent for Multi-Object Demand-driven Navigation
Hongcheng Wang, Peiqi Liu, Wenzhe Cai, Mingdong Wu, Zhengyu Qian, Hao Dong Neural Information Processing System (NeurIPS) 2024 [Paper] [Webpage] [Code] |
|
| Human-centered In-building Embodied Delivery Benchmark
Zhuoquan Xu, Yang Liu, Xiaoqi Li, Jiyao Zhang, Hao Dong arXiv 2024 [Paper] [Webpage] |
|
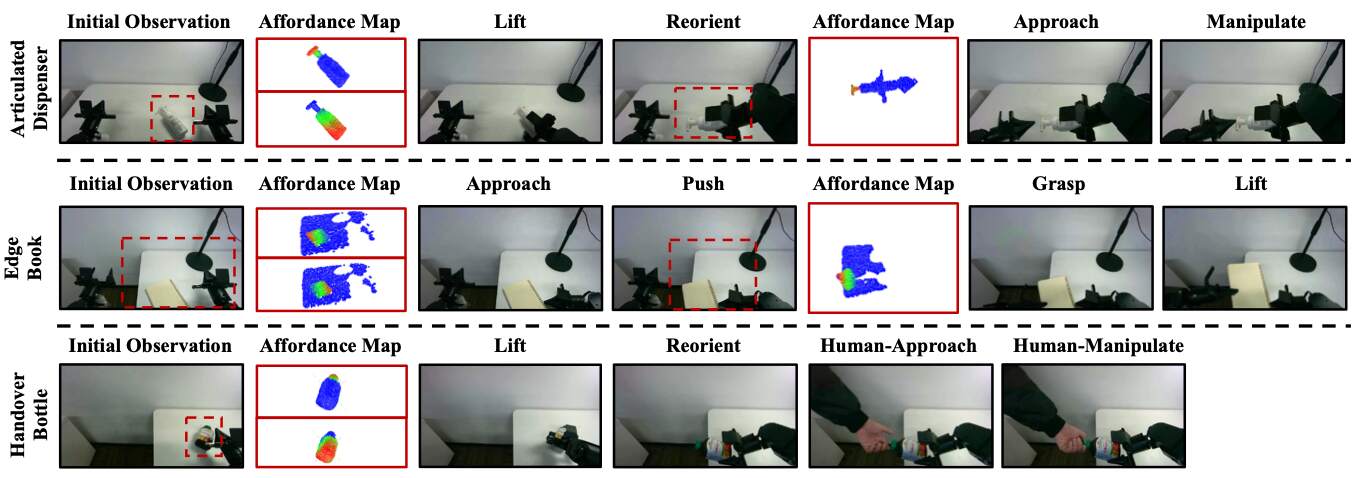
| UniDexFPM: Universal Dexterous Functional Pre-grasp Manipulation via Diffusion Policy
Tianhao Wu, YunChong Gan, Mingdong Wu, Jingbo Cheng, Yaodong Yang, Yixin Zhu, Hao Dong arXiv 2024 [Paper] [Webpage] [Code] |
|
| TARGO: Benchmarking Target-driven Object Grasping under Occlusions
Yan Xia, Ran Ding, Ziyuan Qin, Guanqi Zhan, Kaichen Zhou, Long Yang, Hao Dong, Daniel Cremers arXiv 2024 [Paper] [Webpage] [Code] |
|
| InstructNav: Zero-shot System for Generic Instruction Navigation in Unexplored Environment
--- The world's first general navigation large model that unifies visual-language navigation, object navigation as well as demand-driven navigation into one single framework. Yuxing Long, Wenzhe Cai, Hongcheng Wang, Guanqi Zhan, Hao Dong Conference on Robot Learning (CoRL) 2024 [Paper] [Webpage] [Code] [量子位] |
|
| AIC-MLLM: Autonomous Interactive Correction MLLM for Robust Robotic Manipulation
--- The first automatic system for low-level end-effector action correction in manipulation tasks. Chuyan Xiong, Chengyu Shen, Xiaoqi Li, Kaichen Zhou, Jiaming Liu, Ruiping Wang, Hao Dong Conference on Robot Learning (CoRL) 2024 [Paper] [Webpage] |
|
| A3VLM: Actionable Articulation-Aware Vision Language Model
Siyuan Huang, Haonan Chang, Yuhan Liu, Yimeng Zhu, Hao Dong, Peng Gao, Abdeslam Boularias, Hongsheng Li Conference on Robot Learning (CoRL) 2024 [Paper] [Code] [OpenGVLab摘要] |
|
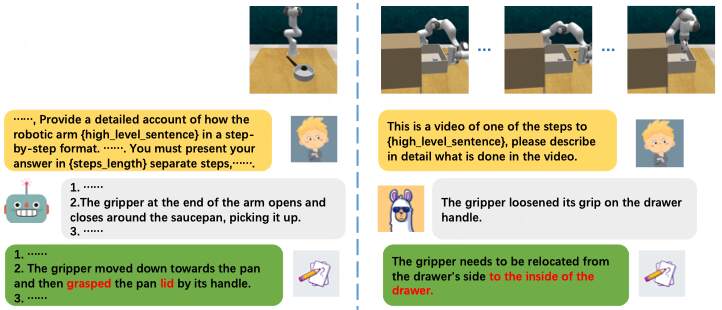
| NaturalVLM: Leveraging Fine-grained Natural Language for Affordance-Guided Visual Manipulation
Ran Xu, Yan Shen, Xiaoqi Li, Ruihai Wu, Hao Dong IEEE Robotics and Automation Letters (RAL) 2024 [Paper] [Webpage] |
|
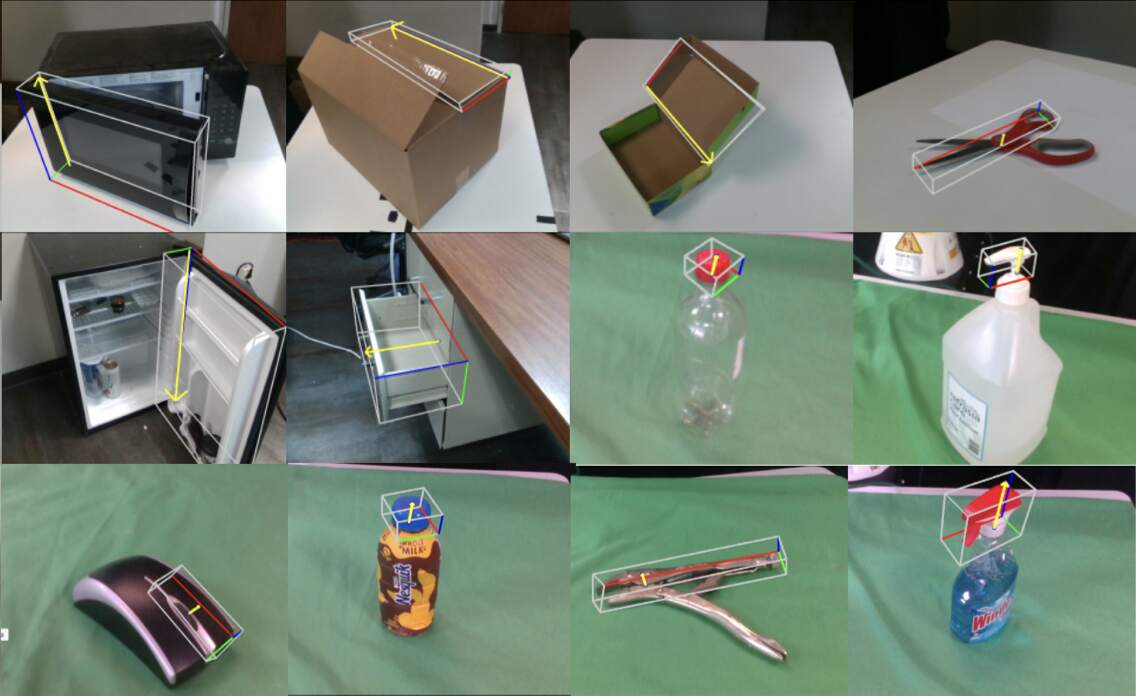
| Omni6DPose: A Benchmark and Model for Universal 6D Object Pose Estimation and Tracking
--- The largest-scale benchmark for universal 6D object pose estimation. Jiyao Zhang, Weiyao Huang, Bo Peng, Mingdong Wu, Fei Hu, Zijian Chen, Bo Zhao, Hao Dong European Conference on Computer Vision (ECCV) 2024 [Paper] [Webpage] [Code] [计算机视觉工坊] |
|
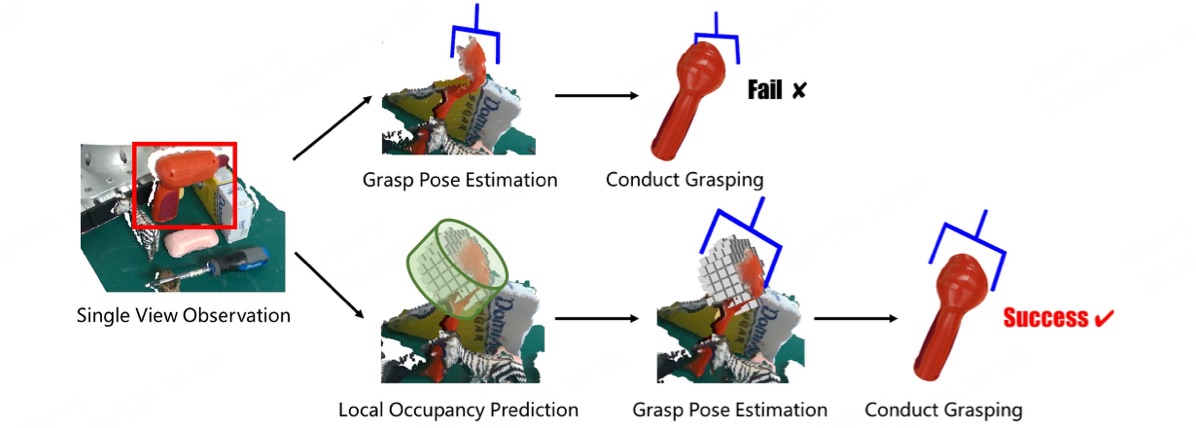
| Local Occupancy-Enhanced Object Grasping with Multiple Triplanar Projection
Kangqi Ma, Hao Dong, Yadong Mu European Conference on Computer Vision (ECCV) 2024 [Paper] |
|
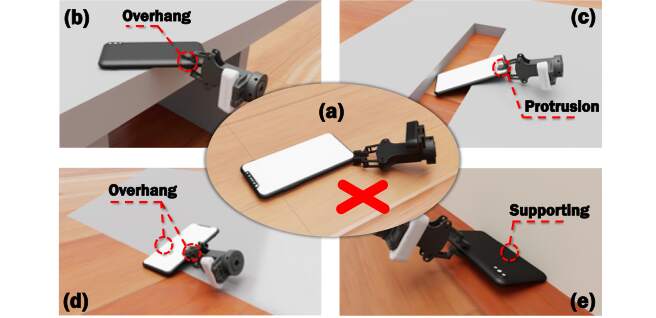
| PreAfford: Universal Affordance-Based Pre-Grasping for Diverse Objects and Environments
Kairui Ding, Boyuan Chen, Ruihai Wu, Yuyang Li, Zongzheng Zhang, Huan-ang Gao, Siqi Li, Yixin Zhu, Guyue Zhou, Hao Dong, Hao Zhao International Conference on Intelligent Robots and Systems (IROS) 2024 (Oral) [Paper] [Webpage] [Code] |
|
| ManipVQA: Injecting Robotic Affordance and Physically Grounded Information into Multi-Modal Large Language Models
Siyuan Huang, Iaroslav Ponomarenko, Zhengkai Jiang, Xiaoqi Li, Xiaobin Hu, Peng Gao, Hongsheng Li, Hao Dong International Conference on Intelligent Robots and Systems (IROS) 2024 (Oral) [Paper] [Code] |
|
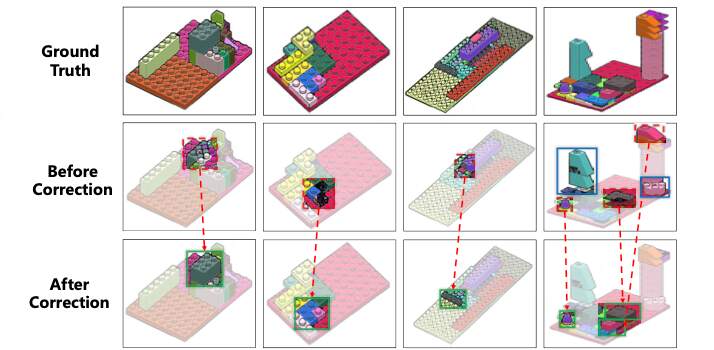
| SCANet: Correcting LEGO Assembly Errors with Self-Correct Assembly Network
--- IROS 2024 Best Application Paper Finalist (4/3645) Yuxuan Wan, Kaichen Zhou, Jinhong Chen, Hao Dong International Conference on Intelligent Robots and Systems (IROS) 2024 (Oral) [Paper] [Webpage] [Code] [公众号] [Certification] |
|
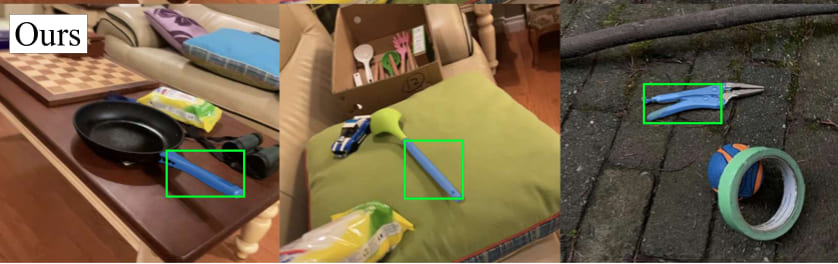
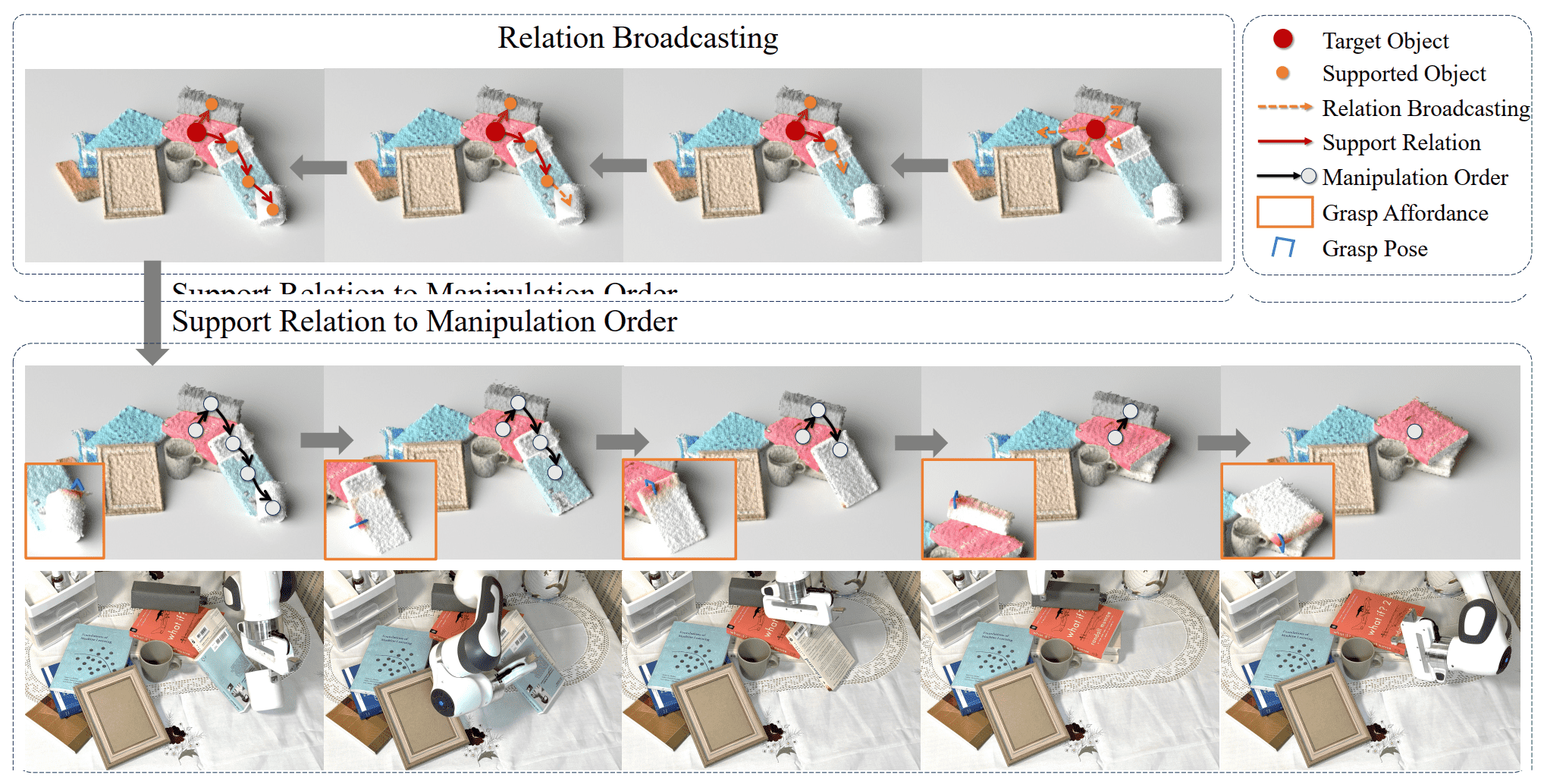
| Broadcasting Support Relations Recursively from Local Dynamics for Object Retrieval in Clutters
Yitong Li*, Ruihai Wu*, Haoran Lu, Chuanruo Ning, Yan Shen, Guanqi Zhan, Hao Dong Robotics: Science and Systems (RSS) 2024 [Paper] [Webpage] [Code] |
|
| MPI: Learning Manipulation by Predicting Interaction
Jia Zeng, Qingwen Bu, Bangjun Wang, Wenke Xia, Li Chen, Hao Dong, Haoming Song, Dong Wang, Di Hu, Ping Luo, Heming Cui, Bin Zhao, Xuelong Li, Yu Qiao, Hongyang Li Robotics: Science and Systems (RSS) 2024 [Paper] [Webpage] [Code] |
|
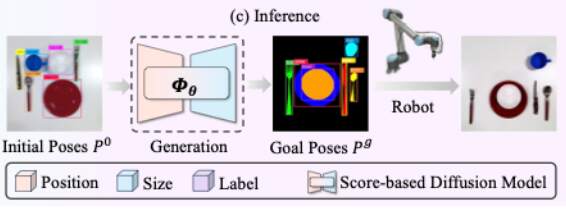
| LVDiffusor: Distilling Functional Rearrangement Priors from Large Models into Diffusor
Yiming Zeng*, Mingdong Wu*, Long Yang, Jiyao Zhang, Hao Ding, Hui Cheng, Hao Dong IEEE Robotics and Automation Letters (RAL) 2024 [Paper] [Webpage] [Code] |
|
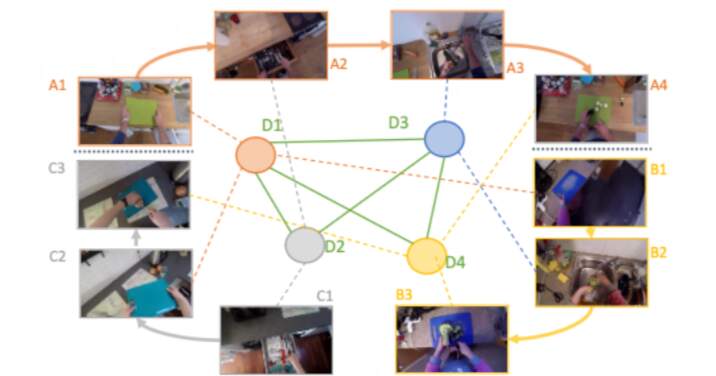
| Pattern4Ego: Learning Egocentric Video Representation Using Cross-Video Activity Patterns
Ruihai Wu, Yourong Zhang, Yu Qi, Andy Guanhong Chen, Hao Dong International Conference on Multimedia Retrieval (ICMR) 2024 [Paper] |
|
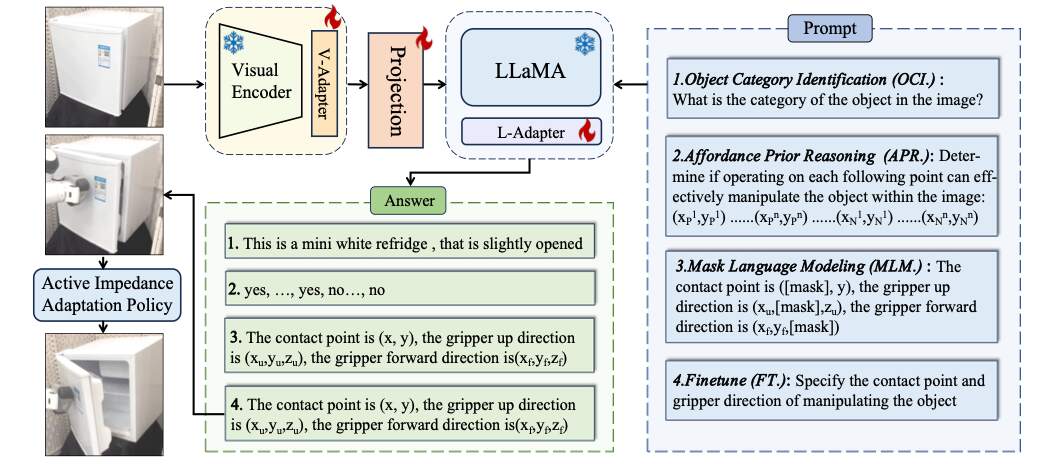
| ManipLLM: Embodied Multimodal Large Language Model for Object-Centric Robotic Manipulation
Xiaoqi Li, Mingxu Zhang, Yiran Geng, Haoran Geng, Yuxing Long, Yan Shen, Renrui Zhang, Jiaming Liu, Hao Dong Conference on Computer Vision and Pattern Recognition (CVPR) 2024 [Paper] [Webpage] [Code] [量子位] [强化学习技术前沿] [集智书童] |
|
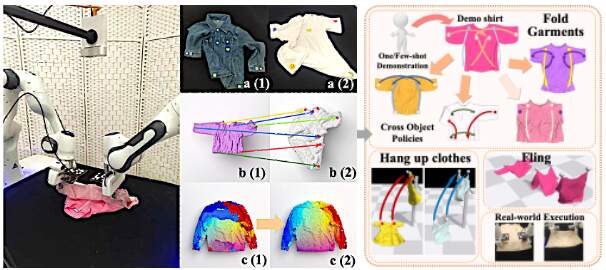
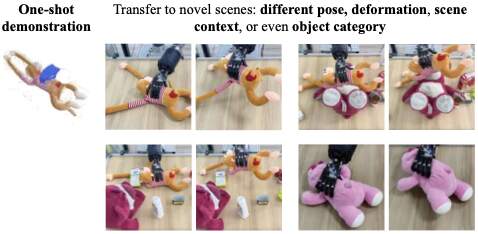
| UniGarmentManip: A Unified Framework for Category-Level Garment Manipulation via Dense Visual Correspondence
--- The world's first work of category-level garment manipulation with only few-shot demonstrations --- China Embodied AI Conference 2025 - Outstanding Young Researcher Paper Nomination Award Ruihai Wu, Haoran Lu, Yiyan Wang, Yubo Wang, Hao Dong Conference on Computer Vision and Pattern Recognition (CVPR) 2024 [Paper] [Webpage] [Code] |
|
| No Time to Train: Empowering Non-Parametric Networks for Few-shot 3D Scene Segmentation
Xiangyang Zhu, Renrui Zhang, Bowei He, Ziyu Guo, Jiaming Liu, Han Xiao, Chaoyou Fu, Hao Dong, Peng Gao Conference on Computer Vision and Pattern Recognition (CVPR) 2024 (Highlight) [Paper] [Code] [公众号] |
|
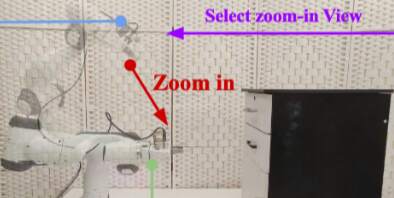
| ImageManip: Image-based Robotic Manipulation with Affordance-guided Next View Selection
Xiaoqi Li, Yanzi Wang, Yan Shen, Haoran Lu, Qianxu Wang, Ponomarenko Iaroslav, Boshi An, Jiaming Liu, Hao Dong arXiv 2023 [Paper] [Webpage] |
|
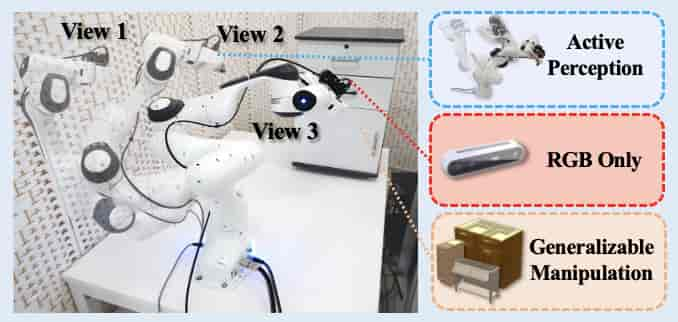
| RGBManip: Monocular Image-based Robotic Manipulation through Active Object Pose Estimation
Boshi An, Yiran Geng, Kai Chen, Xiaoqi Li, Qi Dou, Hao Dong International Conference on Robotics and Automation (ICRA) 2024 [Paper] [Webpage] [Code] [北大] |
|
| Articulated Object Manipulation with Coarse-to-fine Affordance for Mitigating the Effect of Point Cloud Noise
Suhan Ling, Yian Wang, Shiguang Wu, Yuzheng Zhuang, Tianyi Xu, Yu Li, Chang Liu, Hao Dong International Conference on Robotics and Automation (ICRA) 2024 [Paper] [Webpage] [Code] |
|
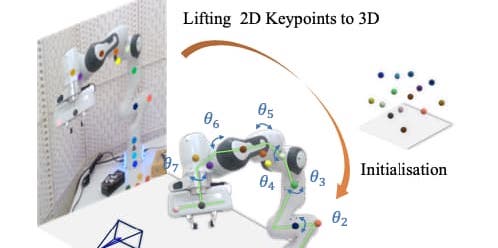
| RoboKeyGen: Robot Pose and Joint Angles Estimation via Diffusion-based 3D Keypoint Generation
Yang Tian, Jiyao Zhang, Guowei Huang, Bin Wang, Ping Wang, Jiangmiao Pang, Hao Dong International Conference on Robotics and Automation (ICRA) 2024 [Paper] [Webpage] [Code] |
|
| Discuss Before Moving: Visual Language Navigation via Multi-expert Discussions --- The world's first visual language navigation large model system deployed in real world Yuxing Long, Xiaoqi Li, Wenzhe Cai, Hao Dong International Conference on Robotics and Automation (ICRA) 2024 [Paper] [Webpage] [Code] [量子位] |
|
| PixNav: Bridging Zero-shot Object Navigation and Foundation Models through Pixel-guided Navigation Skill
--- The world's first purely visual-based object goal navigation large model Wenzhe Cai, Siyuan Huang, Guangran Cheng, Yuxing Long, Peng Gao, Changyin Sun, Hao Dong International Conference on Robotics and Automation (ICRA) 2024 [Paper] [Webpage] [Code] [北大] |
|
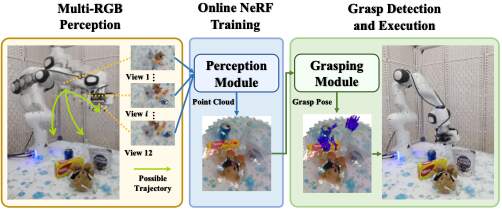
| RGBGrasp: Image-based Object Grasping by Capturing Multiple Views during Robot Arm Movement with Neural Radiance Field
Chang Liu, Kejian Shi, Kaichen Zhou, Haoxiao Wang, Jiyao Zhang, Hao Dong IEEE Robotics and Automation Letters (RAL) 2024 [Paper] [Webpage] |
|
| SparseDFF: Sparse-View Feature Distillation for One-Shot Dexterous Manipulation
Qianxu Wang, Haotong Zhang, Congyue Deng, Yang You, Hao Dong, Yixin Zhu, Leonidas Guibas International Conference on Learning Representations (ICLR) 2024 [Paper] [Webpage] [Code] |
|
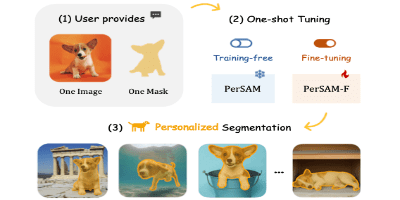
| PerSAM: Personalize Segment Anything Model with One Shot
Renrui Zhang, Zhengkai Jiang, Ziyu Guo, Shilin Yan, Junting Pan, Hao Dong, Peng Gao, Hongsheng Li International Conference on Learning Representations (ICLR) 2024 [Paper] [Webpage] [Code] [AIWalker] |
|
| Scalable Geometric Fracture Assembly via Co-creation Space among Assemblers
Ruiyuan Zhang, Jiaxiang Liu, Zexi Li, Hao Dong, Jie Fu, Chao Wu AAAI Conference on Artificial Intelligence 2024 [Paper] [Code] |
|
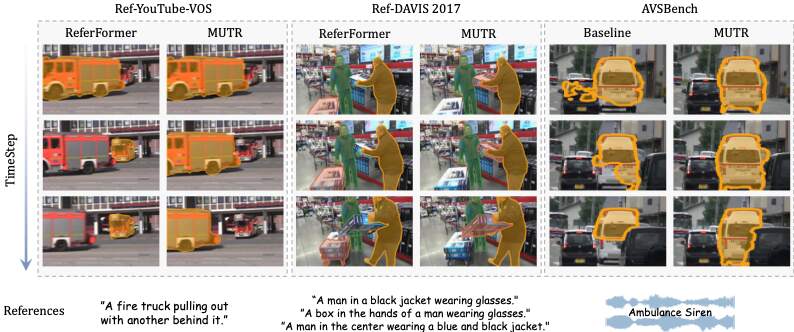
| Referred by Multi-Modality: A Unified Temporal Transformer for Video Object Segmentation
Shilin Yan, Renrui Zhang, Ziyu Guo, Wenchao Chen, Wei Zhang, Hongyang Li, Yu Qiao, Hao Dong, Zhongjiang He, Peng Gao AAAI Conference on Artificial Intelligence 2024 [Paper] [Code] |
|
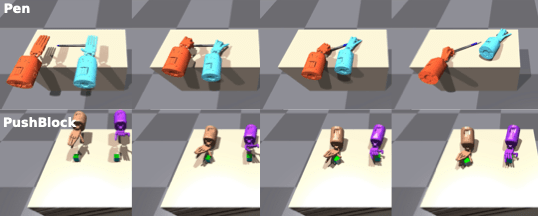
| Bi-DexHands: Towards Human-Level Bimanual Dexterous Manipulation
--- The world's first bimanual dexterous manipulation benchmark (in simulation) Yuanpei Chen, Yiran Geng, Fangwei Zhong, Jiaming Ji, Jiechuang Jiang, Zongqing Lu, Hao Dong, Yaodong Yang IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI) 2023 [Paper] [Webpage] [Code] |
|
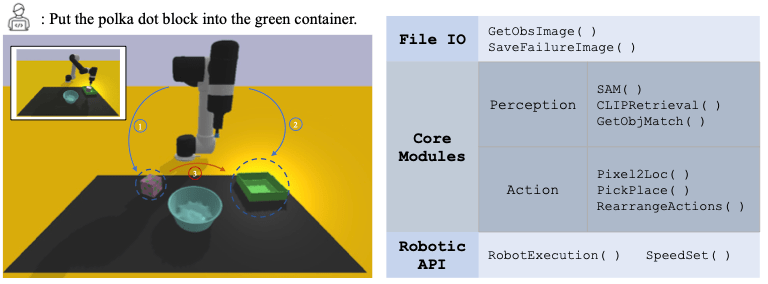
| Instruct2Act: Mapping Multi-modality Instructions to Robotic Actions with Large Language Model
Siyuan Huang, Zhengkai Jiang, Hao Dong, Yu Qiao, Peng Gao, Hongsheng Li arXiv 2023 [Paper] [Code] [机器人3D感知] [CSDN] |
|
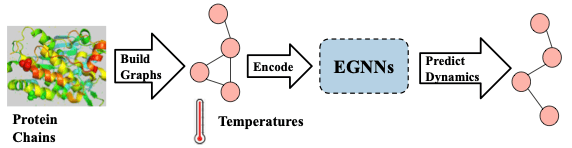
| Mixup-Augmented Meta-Learning for Sample-Efficient Fine-Tuning of Protein Simulators
Jingbang Chen, Yian Wang, Xingwei Qu, Shuangjia Zheng, Yaodong Yang, Hao Dong, Jie Fu arXiv 2023 [Paper] [Code] |
|
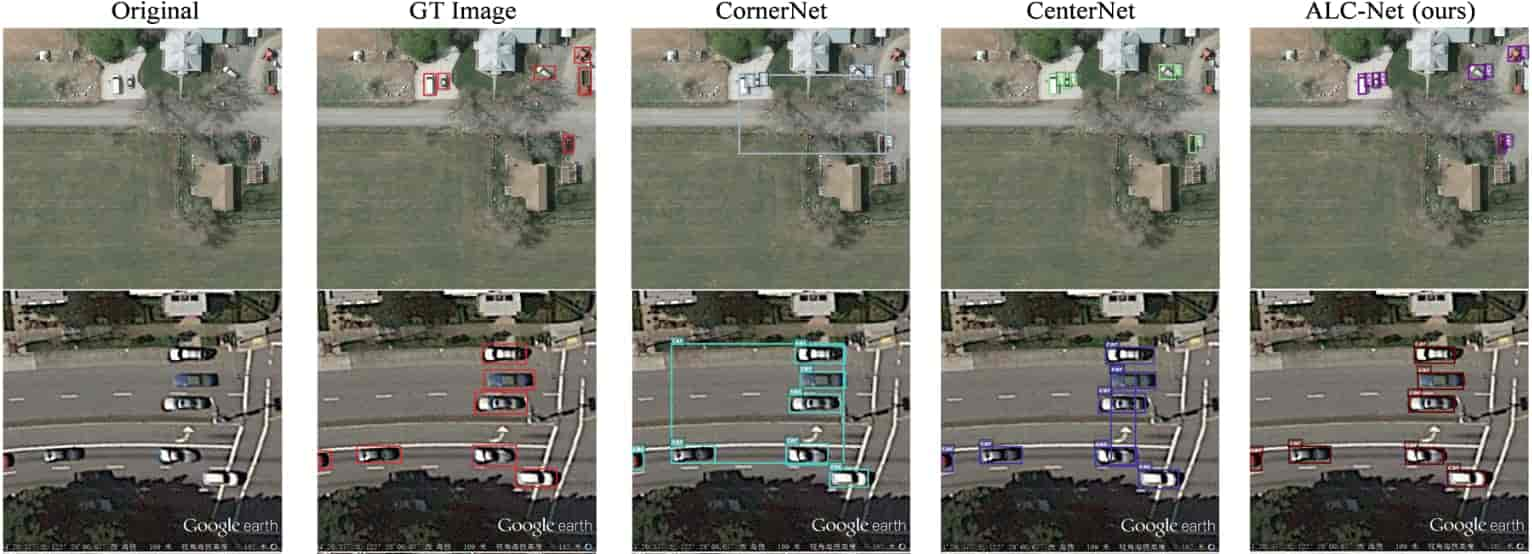
| Posterior Instance Injection Detector for Arbitrary-Oriented Object Detection From Optical Remote-Sensing Imagery
Tong Zhang, Yin Zhuang, He Chen, Guanqun Wang, Lihui Ge, Liang Chen, Hao Dong, Lianlin Li Remote Sensing 2023 [Paper] |
|
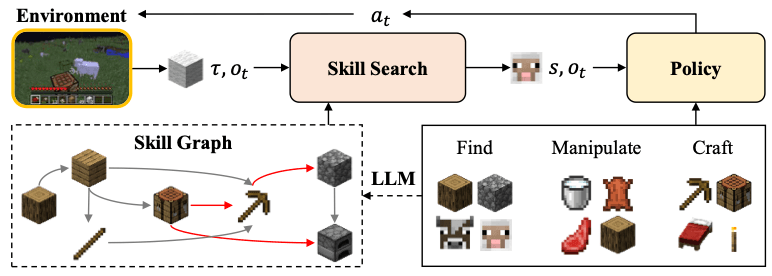
| Plan4MC: Skill Reinforcement Learning and Planning for Open-World Minecraft Tasks
Haoqi Yuan, Chi Zhang, Hongcheng Wang, Feiyang Xie, Penglin Cai, Hao Dong, Zongqing Lu Neural Information Processing Systems (NeurIPS) FMDM Workshop 2023 [Paper] [Webpage] [Code] [机器之心] |
|
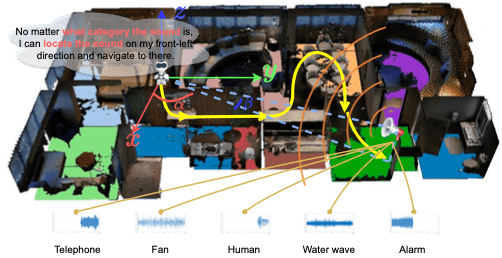
| Find What You Want: Learning Demand-conditioned Object Attribute Space for Demand-driven Navigation
---The world's first human demand-driven navigation model Hongcheng Wang, Andy Guan Hong Chen, Xiaoqi Li, Mingdong Wu, Hao Dong Neural Information Processing Systems (NeurIPS) 2023 [Paper] [Webpage] [Video] [Code] [BAAI] |
|
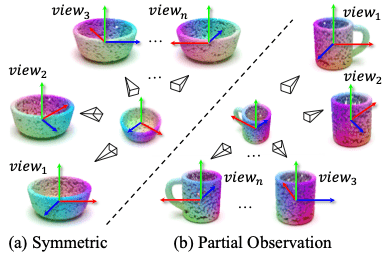
| GenPose: Generative Category-level Object Pose Estimation via Diffusion Models
--- The next-generation category-level 6D object pose paradigm: generative pose estimation Jiyao Zhang, Mingdong Wu, Hao Dong Neural Information Processing Systems (NeurIPS) 2023 [Paper] [Webpage] [Code] [北大] |
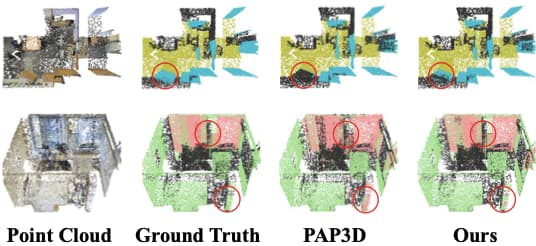
|
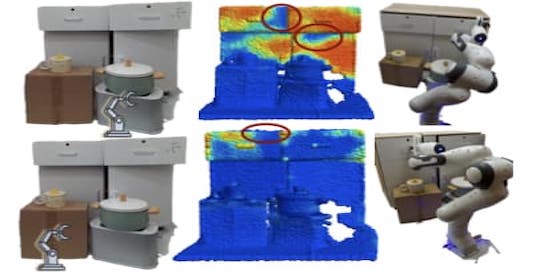
| Learning Environment-aware Affordance for 3D Articulated Object Manipulation under Occlusions --- The world's first work of affordance learning with environment constraints Ruihai Wu, Kai Cheng, Yan Zhao, Chuanruo Ning, Guanqi Zhan, Hao Dong Neural Information Processing Systems (NeurIPS) 2023 [Paper] [Webpage] [Code] [AIR学术] [AIR论坛] |
|
| GraspGF: Learning Score-based Grasping Primitive for Human-assisting Dexterous Grasping
Tianhao Wu, Mingdong Wu, Jiyao Zhang, Yunchong Gan, Hao Dong Neural Information Processing Systems (NeurIPS) 2023 [Paper] [Webpage] [Code] [新智元] |
|
| Where2Explore: Few-shot Affordance Learning for Unseen Novel Categories of Articulated Objects --- The world's first work of few-shot exploration for object manipulation with novel geometries Chuanruo Ning, Ruihai Wu, Haoran Lu, Kaichun Mo, Hao Dong Neural Information Processing Systems (NeurIPS) 2023 [Paper] [Webpage] [Code] |
|
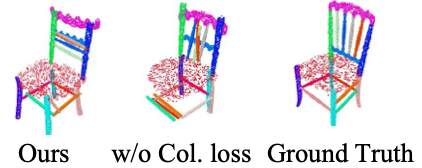
| Learning Gradient Fields for Scalable and Generalizable Irregular Packing
Tianyang Xue, Mingdong Wu, Lin Lu, Haoxuan Wang, Hao Dong, Baoquan Chen SIGGRAPH Asia 2023 [Paper] [Webpage] |
|
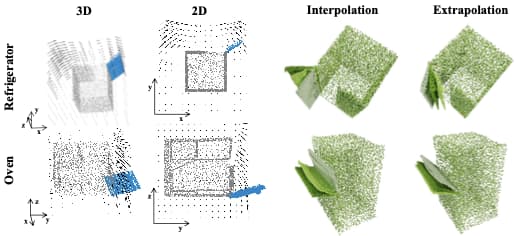
| Learning Part Motion of Articulated Objects Using Spatially Continuous Neural Implicit Representations
Yushi Du, Ruihai Wu, Yan Shen, Hao Dong British Machine Vision Conference (BMVC) 2023 [Paper] [Webpage] [Code] |
|
| Score-PA: Score-based 3D Part Assembly
Junfeng Cheng, Mingdong Wu, Ruiyuan Zhang, Guanqi Zhan, Chao Wu, Hao Dong British Machine Vision Conference (BMVC) 2023 (Oral) [Paper] [Code] |
|
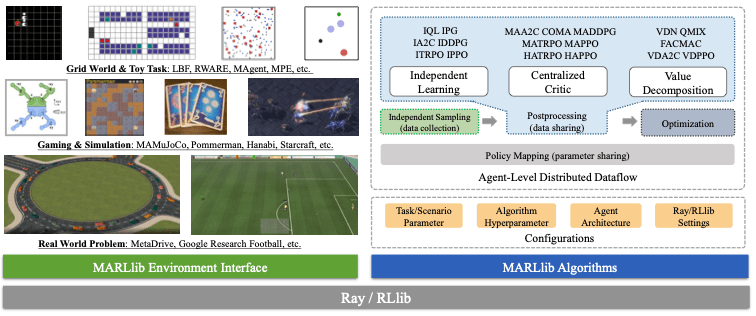
| MARLlib: A Scalable and Efficient Multi-agent Reinforcement Learning Library
Siyi Hu, Yifan Zhong, Minquan Gao, Weixun Wang, Hao Dong, Xiaodan Liang, Zhihui Li, Xiaojun Chang, Yaodong Yang Journal of Machine Learning Research 2023 [Paper] [Documentation] [Code] |
|
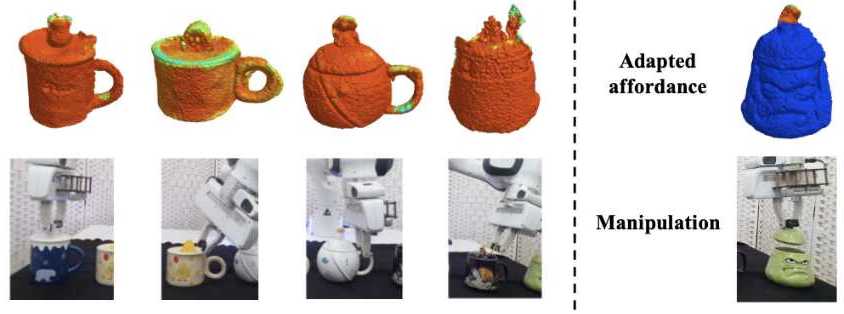
| DefoAfford: Learning Foresightful Dense Visual Affordance for Deformable Object Manipulation
Ruihai Wu, Chuanruo Ning, Hao Dong International Conference on Computer Vision (ICCV) 2023 [Paper] [Webpage] [Code] [将门创投] [AIR学术] [AIR论坛] |
|
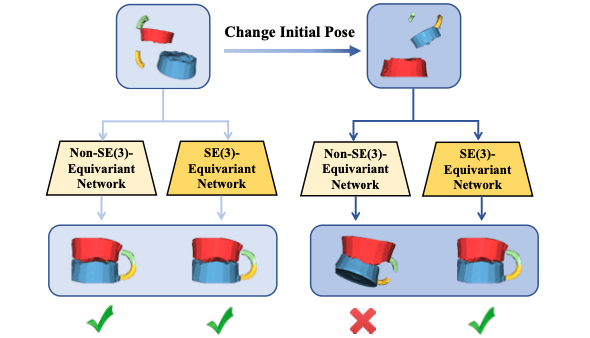
| Leveraging SE(3) Equivariance for Learning 3D Geometric Shape Assembly
Ruihai Wu, Chenrui Tie, Yushi Du, Yan Zhao, Hao Dong International Conference on Computer Vision (ICCV) 2023 [Paper] [Webpage] [Code] |
|
| Learning a Universal Human Prior for Dexterous Manipulation from Human Preference
Zihan Ding, Yuanpei Chen, Allen Z. Ren, Shixiang Shane Gu, Hao Dong, Chi Jin RSS Workshop on Learning Dexterous Manipulation 2023 [Paper] |
|
| Learning Semantic-Agnostic and Spatial-Aware Representation for Generalizable Visual-Audio Navigation
Hongcheng Wang, Yuxuan Wang, Fangwei Zhong, Mingdong Wu, Jianwei Zhang, Yizhou Wang, Hao Dong IEEE Robotics and Automation Letters (RAL) 2023 [Paper] [Webpage] [Code] [CFCS] |
|
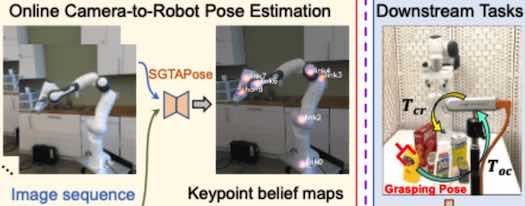
| SGTAPose: Robot Structure Prior Guided Temporal Attention for Camera-to-Robot Pose Estimation from Image Sequence
Yang Tian, Jiyao Zhang, Zekai Yin, Hao Dong Conference on Computer Vision and Pattern Recognition (CVPR) 2023 [Paper] [Webpage] [Code] |
|
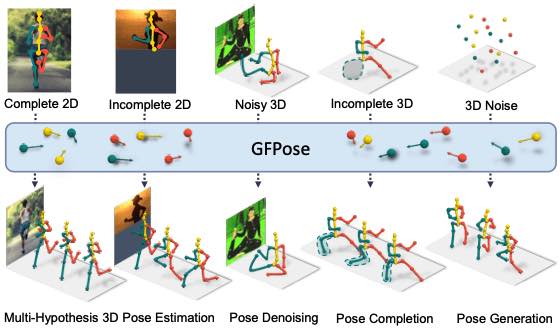
| GFPose: Learning Gradient Field for Multi-Hypothesis 3D Human Pose Estimation
Hai Ci, Mingdong Wu, Wentao Zhu, Xiaoxuan Ma, Hao Dong, Fangwei Zhong, Yizhou Wang Conference on Computer Vision and Pattern Recognition (CVPR) 2023 [Paper] [Webpage] [Code] [CFCS] |
|
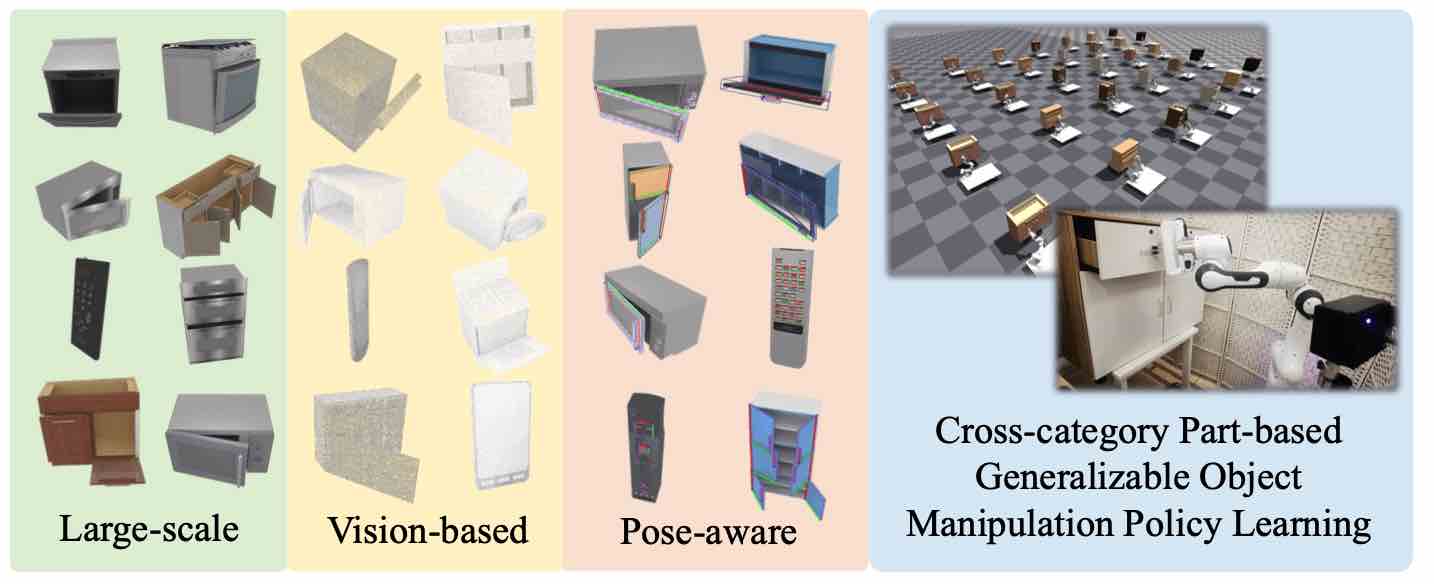
| PartManip: Learning Cross-Category Generalizable Part Manipulation Policy from Point Cloud Observations
Haoran Geng, Ziming Li, Yiran Geng, Jiayi Chen, Hao Dong, He Wang Conference on Computer Vision and Pattern Recognition (CVPR) 2023 [Paper] [Webpage] [Code] |
|
| ReBNN: Resilient Binary Neural Network
Sheng Xu, Yanjing Li, Teli Ma, Mingbao Lin, Hao Dong, Baochang Zhang, Peng Gao, Jinhu Lu AAAI Conference on Artificial Intelligence 2023 (Oral) [Paper] [Code] |
|
| RLAfford: End-to-End Affordance Learning for Robotic Manipulation
Yiran Geng, Boshi An, Haoran Geng, Yuanpei Chen, Yaodong Yang, Hao Dong International Conference on Robotics and Automation (ICRA) 2023 [Paper] [Webpage] [Code] [CFCS] [AIR学术] [AIR论坛] |
|
| DualAfford: Learning Collaborative Visual Affordance for Dual-gripper Object Manipulation
Yan Zhao, Ruihai Wu, Zhehuan Chen, Yourong Zhang, Qingnan Fan, Kaichun Mo, Hao Dong International Conference on Learning Representations (ICLR) 2023 [Paper] [Webpage] [Code] [AIR学术] [AIR论坛] |
|
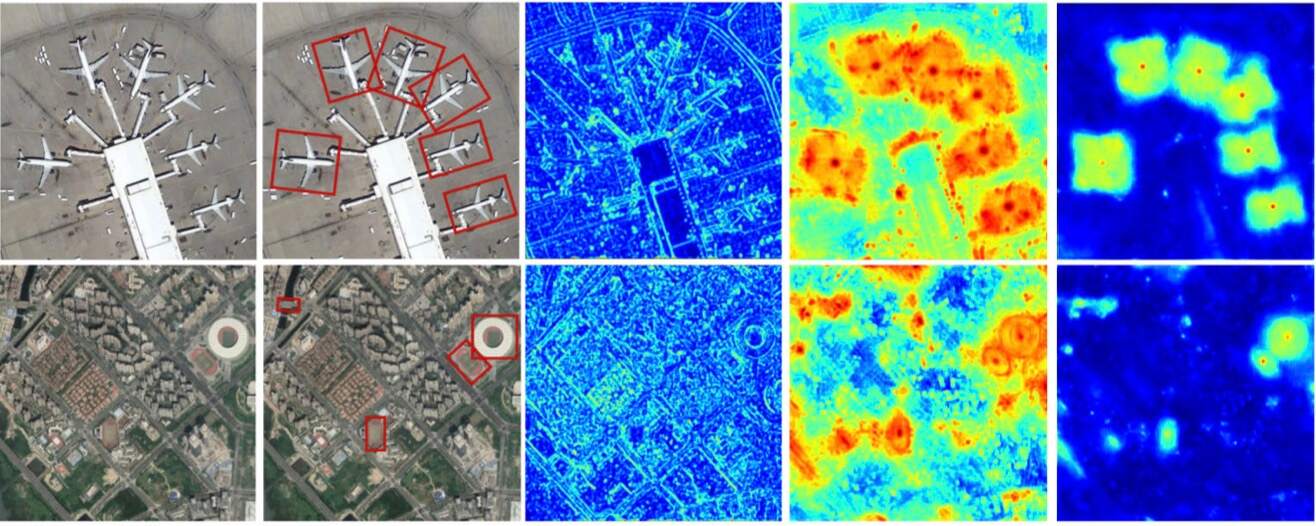
| Object-Centric Masked Image Modeling-Based Self-Supervised Pretraining for Remote Sensing Object Detection
Tong Zhang, Yin Zhuang, He Chen, Liang Chen, Guanqun Wang, Peng Gao, Hao Dong IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 2023 [Paper] |
|
| P2FEViT: Plug-and-Play CNN Feature Embedded Hybrid Vision Transformer for Remote Sensing Image Classification
Guanqun Wang, He Chen, Liang Chen, Yin Zhuang, Shanghang Zhang, Tong Zhang, Hao Dong, Peng Gao Remote Sensing 2023 [Paper] [Code] |
|
| Intelligent Indoor Metasurface Robotics
--- Journal cover: a new robot concept of robot percepton and privacy Hanting Zhao, Shengguo Hu, Hongrui Zhang, Zhuo Wang, Hao Dong, Philipp del Hougne, Tie Jun Cui, Lianlin Li National Science Review (NSR) 2022 [Paper] [Journal Cover] [中国科学杂志社] |
|
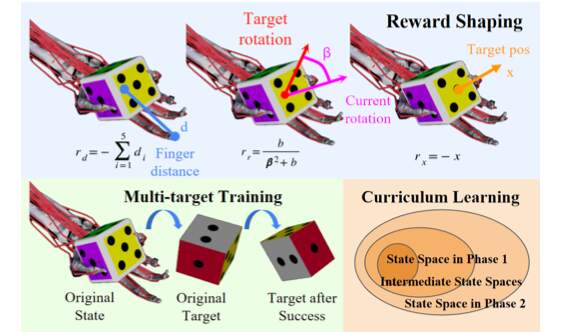
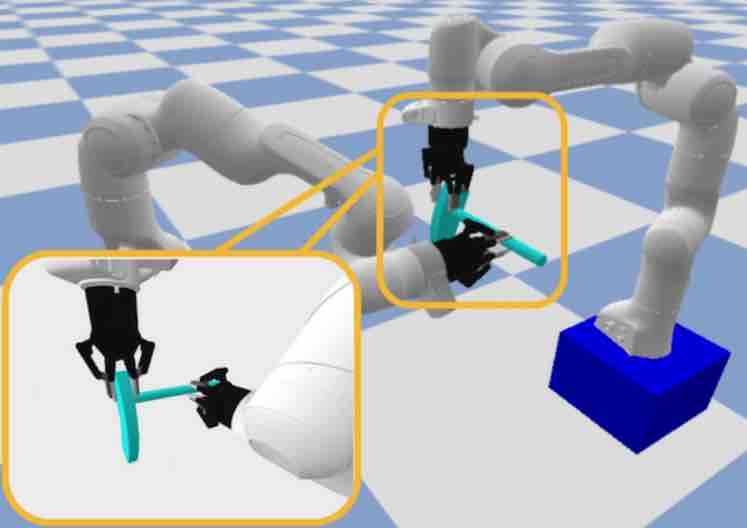
| MyoChallenge 2022: Learning Contact-rich Manipulation using a Musculoskeletal Hand
--- First Place in NeurIPS 2022 Challenge Track (1st in 340 submissions from 40 teams) Vittorio Caggiano, Guillaume Durandau, Huwawei Wang, Alberto Chiappa, Alexander Mathis, Pablo Tano, Nisheet Patel, Alexandre Pouget, Pierre Schumacher, Georg Martius, Daniel Haeufle, Yiran Geng, Boshi An, Yifan Zhong, Jiaming Ji, Yuanpei Chen, Hao Dong, Yaodong Yang, Rahul Siripurapu, Luis Eduardo Ferro Diez, Michael Kopp, Vihang Patil, Sepp Hochreiter, Yuval Tassa, Josh Merel, Randy Schultheis, Seungmoon Song, Massimo Sartori, Vikash Kumar Proceedings of the NeurIPS 2022 Competitions Track, Proceedings of Machine Learning Research [Paper] [Challenge Page] [Code] [Award] [Slide] [Talk] [Media(BIGAI)] [Media(CFCS)] [Media(PKU-EECS)] [Media(IAI)] [Media(PKU)] [Media(China Youth Daily)] |
|
| Heterogeneous-Agent Mirror Learning: A Continuum of Solutions to Cooperative MARL
Jakub Grudzien Kuba, Xidong Feng, Shiyao Ding, Hao Dong, Jun Wang, Yaodong Yang arXiv 2022 [Paper] [Code] |
|
| GraspARL: Dynamic Grasping via Adversarial Reinforcement Learning Tianhao Wu, Fangwei Zhong, Yiran Geng, Hongchen Wang, Yongjian Zhu, Yizhou Wang, Hao Dong arXiv 2022 [Paper] |
|
| RoboAssembly: Learning Generalizable Furniture Assembly Policy in a Novel Multi-robot
Contact-rich Simulation Environment Mingxin Yu*, Lin Shao*, Zhehuan Chen, Tianhao Wu, Qingnan Fan, Kaichun Mo, Hao Dong arXiv 2022 [Paper] [Webpage] |
|
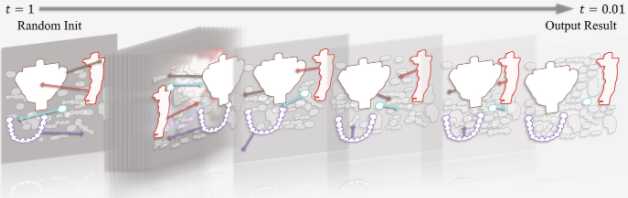
| TarGF: Learning Target Gradient Field to Rearrange Objects without Explicit Goal Specification
Mingdong Wu, Fangwei Zhong, Yulong Xia, Hao Dong Neural Information Processing Systems (NeurIPS) 2022 [Paper] [Webpage] [Code] |
|
| Towards Human-Level Bimanual Dexterous Manipulation with Reinforcement Learning
Yuanpei Chen, Tianhao Wu, Shengjie Wang, Xidong Feng, Jiechuang Jiang, Stephen Marcus McAleer, Hao Dong, Zongqing Lu, Song-Chun Zhu, Yaodong Yang Neural Information Processing Systems (NeurIPS) Datasets and Benchmarks 2022 [Paper] [Webpage] [Code] |
|
| AdaAfford: Learning to Adapt Manipulation Affordance for 3D Articulated Objects via
Few-shot Interactions
--- The world's first work of active exploration for object manipulation with invisible dynamics and kinematics Yian Wang*, Ruihai Wu*, Kaichun Mo*, Jiaqi Ke, Qingnan Fan, Leonidas Guibas, Hao Dong European Conference on Computer Vision (ECCV) 2022 [Paper] [Webpage] [Code] [CFCS] [AIR学术] [AIR论坛] |
|
| DREDS: Domain Randomization-Enhanced Depth Simulation and Restoration for
Perceiving and Grasping Specular and Transparent Objects
Qiyu Dai*, Jiyao Zhang*, Qiwei Li, Tianhao Wu, Hao Dong, Ziyuan Liu, Ping Tan, He Wang European Conference on Computer Vision (ECCV) 2022 [Paper] [Webpage] [Code] |
|
| Scalable Model-based Policy Optimization for Decentralized Networked Systems Yali Du, Chengdong Ma, Yuchen Liu, Runji Lin, Hao Dong, Jun Wang, Yaodong Yang International Conference on Intelligent Robots and Systems (IROS) 2022 [Paper] [Code] |
|
| VAT-Mart: Learning Visual Action Trajectory Proposals for Manipulating 3D Articulated Objects
--- Youth Outstanding Paper Award Shortlist @ World Artificial Intelligence Conference 2025
Ruihai Wu, Yan Zhao, Kaichun Mo, Zizheng Guo, Yian Wang, Tianhao Wu, Qingnan Fan, Xuelin Chen, Leonidas Guibas, Hao Dong International Conference on Learning Representations (ICLR)2022 [Paper] [Code] [Webpage] [Youtube] [Bilibili] [CFCS] [AIR学术] [AIR论坛] |
|
| Consecutive Pre-Training: A Knowledge Transfer Learning Strategy with Relevant Unlabeled Data for Remote Sensing Domain
Tong Zhang, Peng Gao, Hao Dong, Yin Zhuang, Guanqun Wang, Wei Zhang, He Chen Remote Sensing 2022 [Paper] [Code] |
|
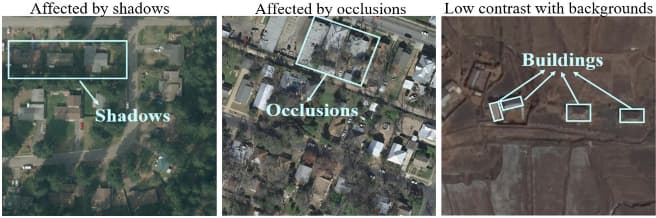
| Hierarchical Disentangling Network for Building Extraction from Very High Resolution Optical Remote Sensing Imagery
Jianhao Li, Yin Zhuang, Shan Dong, Peng Gao, Hao Dong, He Chen, Liang Chen, Lianlin Li Remote Sensing 2022 [Paper] [Code] |
|
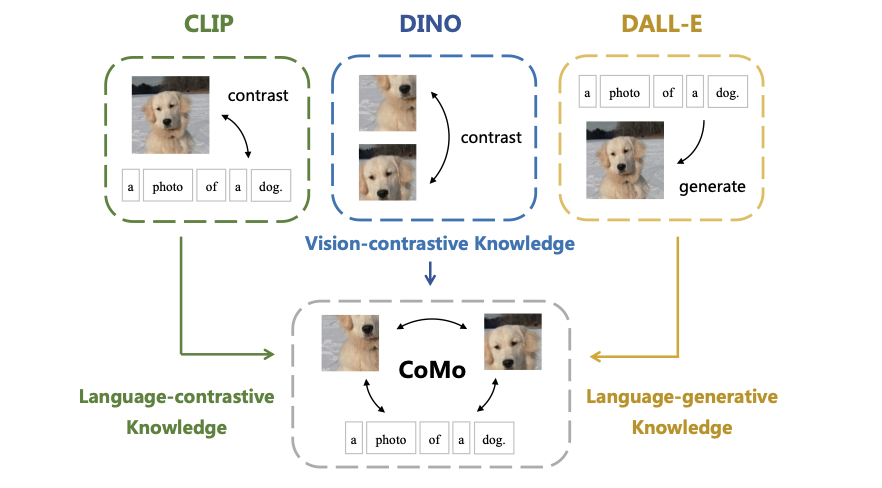
| Collaboration of Pre-trained Models Makes Better Few-shot Learner
Renrui Zhang, Bohao Li, Wei Zhang, Hao Dong, Hongsheng Li, Peng Gao, Yu Qiao arXiv 2022 [Paper] |
|
| Adaptive Local Context Embedding for Small Vehicle Detection from Aerial Optical Remote Sensing Images
Shanjunyu Liu, Yin Zhuang, Hao Dong, Peng Gao, Guanqun Wang, Tong Zhang, Liang Chen, He Chen, Lianlin Li IEEE International Geoscience and Remote Sensing Symposium (IGRASS) 2022 [Paper] |
|
| DMotion: Robotic Visuomotor Control with Unsupervised Forward Model Learned from
Videos ---The first attempt to learn the forward model unsupervisedly via motion disentanglement Haoqi Yuan, Ruihai Wu, Andrew Zhao, Haipeng Zhang, Zihan Ding, Hao Dong International Conference on Intelligent Robots and Systems (IROS) 2021 [Paper] [Webpage] [Code] [CFCS] |
|
| End-to-End Object Detection with Adaptive Clustering Transformer Minghang Zheng, Peng Gao, Xiaogang Wang, Hongsheng Li, Hao Dong British Machine Vision Conference (BMVC) 2021 (Oral) [Paper] [Code] [集智书童] |
|
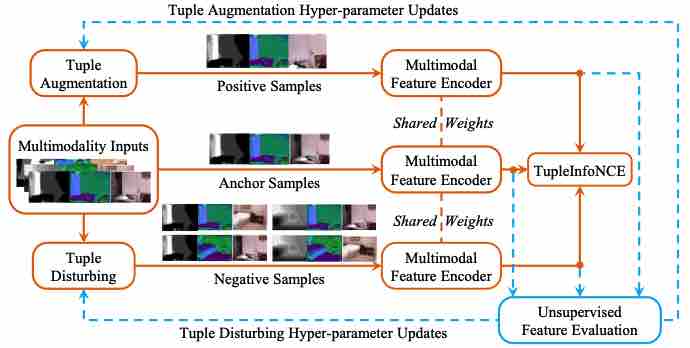
| Contrastive Multimodal Fusion with TupleInfoNCE Yunze Liu, Qingnan Fan, Shanghang Zhang, Hao Dong, Thomas Funkhouser, Li Yi International Conference on Computer Vision (ICCV) 2021 [Paper] [Code] [Code] |
|
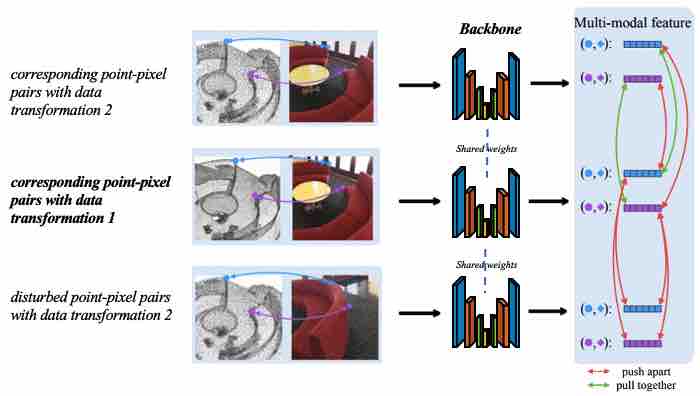
| P4Contrast: Contrastive Learning with Pairs of Point-Pixel Pairs for RGB-D Scene
Understanding Yunze Liu, Li Yi, Shanghang Zhang, Qingnan Fan, Thomas Funkhouser, Hao Dong arXiv 2012.13089 [Paper] [Code] |
|
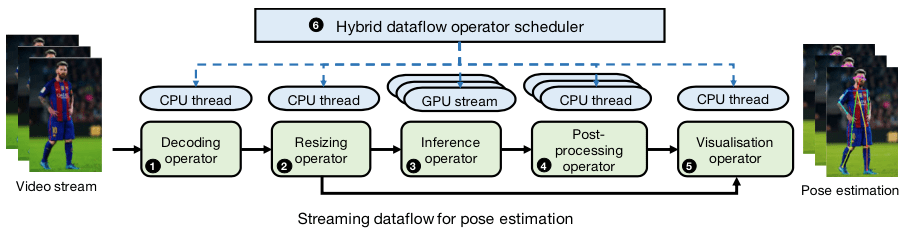
| Fast and Flexible Human Pose Estimation with HyperPose Yixiao Guo*, Jialei Liu*, Guo Li*, Luo Mai, Hao Dong ACM Multimedia (MM) Open Source 2021 [Paper] [Code] |
|
| Efficient Reinforcement Learning Development with RLzoo Zihan Ding, Tianyang Yu, Yanhua Huang, Hongming Zhang, Luo Mai, Hao Dong ACM Multimedia (MM) Open Source 2021 [Paper] [Code] [机器之心] |
|
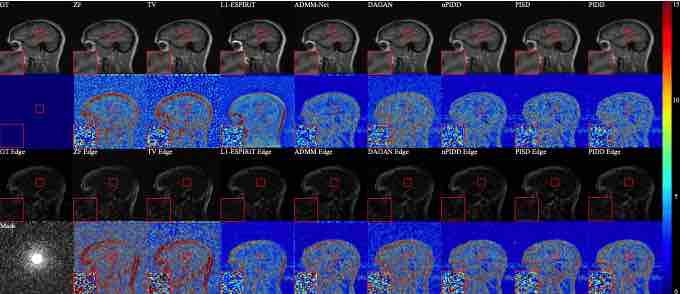
| Edge-Enhanced Dual Discriminator Generative Adversarial Network for Fast MRI with
Parallel Imaging Using Multi-view Information Jiahao Huang, Weiping Ding, Jun Lv, Jingwen Yang, Hao Dong, Javier Del Ser, Jun Xia, Tiaojuan Ren, Stephen Wong, Guang Yang Applied Intelligence 2021 [Paper] |
|
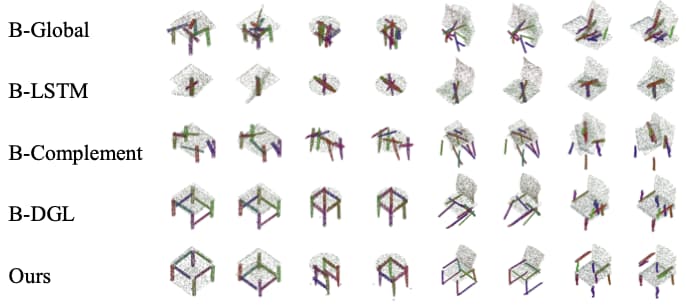
| Generative 3D Part Assembly via Dynamic Graph Learning ---The world's first 3D part assemble model without external guidance Jialei Huang*, Guanqi Zhan*, Qingnan Fan, Kaichun Mo, Lin Shao, Baoquan Chen, Leonidas Guibas, Hao Dong Neural Information Processing Systems (NeurIPS) 2020 [Paper] [Code] [Webpage] ( [机器之心]/ [AI科技评论] ) |

















{kind=link}
{kind=link}
{kind=link}